Альтернативные подходы к определению положения техники на горно-добывающих предприятиях
- 1 — канд. техн. наук заведующий лабораторией Федеральный исследовательский центр угля и углехимии СО РАН ▪ Orcid ▪ Elibrary ▪ Scopus ▪ ResearcherID
- 2 — научный сотрудник Федеральный исследовательский центр угля и углехимии СО РАН ▪ Orcid
- 3 — канд. техн. наук старший научный сотрудник Федеральный исследовательский центр угля и углехимии СО РАН ▪ Orcid
Аннотация
Целью работы являются обзор и рассмотрение альтернативных способов определения положения объектов, в том числе для решения задач диспетчеризации и навигации на технологических участках для работы высокоавтоматизированных транспортных средств без применения спутникового навигационного оборудования. Рассмотрены основные проблемы, связанные с применением спутникового навигационного оборудования для позиционирования транспортных средств, оснащенных автоматизированной системой управления движением, а также погрузочной техники, взаимодействующей с ним. Показаны перспективность и актуальность разработки альтернативных систем и способов позиционирования автоматизированной транспортной составляющей при разработке полезных ископаемых открытым способом. Представлен обзор технологий с подтверждением концепции актуального направления исследований, связанного с вопросами цифровой трансформации горно-добывающей отрасли, в частности обеспечением позиционирования и определением положения техники на горно-добывающих предприятиях без применения средств спутниковой навигации. Проведен анализ существующих решений, их достоинств и недостатков. Решение задачи предложено реализовывать на основе алгоритмов машинного зрения, радиопеленгационного метода и средств лазерной дальнометрии. Приведены варианты взаимодействия вспомогательных и корректирующих устройств в решении задач ориентации объектов в системе локальных координат. Представлены результаты натурных экспериментов и лабораторных исследований методов радиопеленгации и машинного зрения. Описан запатентованный авторами детализированный алгоритм определения координат объектов на выделенном участке, на основе которого предложен способ определения положения погрузочной техники при взаимодействии с транспортными машинами, оснащенными автоматизированной системой управления движением без применения глобальных навигационных спутниковых систем.
Работа выполнена в рамках Государственного задания Федерального исследовательского центра угля и углехимии СО РАН, проект FWEZ-2024-0025 «Разработка научных основ создания автономных и автоматизированных горных машин, оборудования, технических и управляющих систем на базе перспективных цифровых и роботизированных технологий (продление)» (№ 125013101207-7).
Введение
Открытые горные работы с автомобильной транспортировкой характеризуются высокими эксплуатационными затратами по сравнению с другими способами разработки месторождений полезных ископаемых. Только выемочно-погрузочные работы могут составлять до 40 % всех затрат на единицу объема добытого полезного ископаемого [1]. Климатические условия и вредные факторы, сопутствующие открытой разработке месторождений [2], приводят к дефициту квалифицированных кадров на добывающих предприятиях. В ответ на складывающуюся ситуацию горно-добывающие компании в Российской Федерации и за рубежом стремятся к снижению зависимости от человеческого фактора посредством автоматизации процесса транспортировки, что позволит повысить производительность транспортной составляющей до 30 % [3]. По опубликованным данным, ко второму кварталу 2022 г. в мире эксплуатировался флот из более чем тысячи карьерных самосвалов, оснащенных автоматической системой управления движением (АСУД). Прогнозы показывают, что количество карьерных самосвалов с АСУД в мире будет только увеличиваться [4, 5], и ко второй половине 2026 г. объем рынка подобных транспортных средств превысит 4 млрд дол., что подтверждает актуальность разработки АСУД и ее компонентов для карьерного транспорта [6].
Важным условием эффективной работы карьерной техники, оснащенной АСУД, является точное позиционирование внутри автоматизированного участка, которое во многом зависит от привязки к местности и маршрутизации [7, 8]. Современные АСУД и системы диспетчеризации определяют координаты управляемых объектов с помощью глобальных навигационных спутниковых систем (ГНСС), таких как американская Global Positioning System (GPS) и российская глобальная навигационная спутниковая система (ГЛОНАСС) [9-11]. При наличии наземной инфраструктуры GPS позволяет обеспечить точность позиционирования до нескольких десятков сантиметров, без наземной инфраструктуры точность позиционирования снижается до 15-20 м. Для ГЛОНАСС заявленная погрешность определения координат неподвижных объектов с использованием наземной инфраструктуры составляет 1 м.
Однако существует ряд промышленных и технологических задач позиционирования, решение которых общепринятыми методами малоэффективно. К ним можно отнести позиционирование при открыто-подземных технологиях выемки, а также работу в северных районах с неустойчивым уровнем сигнала спутников [7, 12, 13]. Известно, что в Арктике и Антарктике спутниковые навигационные системы имеют погрешности в определении координат объектов [7, 12, 13]. При этом данные территории имеют значительные запасы полезных ископаемых [14-16] и приоритет в освоении.
Несмотря на преимущества ГНСС, применение системы имеет ряд особенностей, которые могут быть рассмотрены как недостатки. В частности, необходимость наземной инфраструктуры для высокой точности, а также малая мощность сигнала, поступающего со спутников при недостаточности покрытия. Например, в среднем мощность сигнала GPS у поверхности Земли составляет всего –160 дБ (1 Вт) [17], что делает его уязвимым для преднамеренного искажения [18-20]. Сигнал может быть полностью заглушен либо подменен, в этом случае навигационное оборудование определит неверные координаты [17, 21]. Кроме того, сигналы от спутниковых навигационных систем могут искажаться и пропадать без внешнего воздействия в связи с влиянием металлических конструкций и рельефа местности [22-24].
Целью исследования являются обзор и рассмотрение альтернативных способов определения положения объектов, в том числе для решения задач диспетчеризации и навигации в рамках технологических участков работы высокоавтоматизированных транспортных средств без применения навига-ционного оборудования. Разработка и внедрение альтернативных способов определения положения и навигации техники с АСУД – актуальные научно-технические задачи [7, 20, 25].
Методы
В литературе описано применение оптических [26, 27] и неоптических [26, 28, 29] методов решения задачи пространственной ориентации объектов в локальной координатной системе. Однако детальное рассмотрение вариантов применения этих методов для позиционирования техники с АСУД требует анализа взаимодействия элементов экскаваторно-автомобильного комплекса при погрузке. Одним из основных условий достижения максимальной производительности технологических участков для работы высокоавтоматизированных транспортных средств является согласованная работа экскаватора и автосамосвала. Для этого существует методика подъезда и установки автосамосвала с АСУД, регламентирующая пространственные и временные параметры процесса с целью рационализации цикла погрузки и обеспечения безопасности. Методика поддерживает рациональность конфигурации установки, имеет рекомендательный характер и основана на анализе промышленной практики и нормативных схем. Ключевым параметром является ориентация автосамосвала параллельно оси забоя. Такое расположение минимизирует время подъезда и установки под погрузку, а также угол поворота стрелы экскаватора. При этом позиционирование осуществляется с правой стороны экскаватора, что обеспечивает безопасную загрузку сбоку или сзади. Хотя установка автосамосвала под углом к оси забоя и может в некоторых случаях сократить угол поворота стрелы, данная конфигурация не рациональна, поскольку увеличивает продолжительность и сложность маневрирования автотранспорта, нивелируя потенциальную экономию времени. Ориентация автосамосвала параллельно оси забоя позволяет унифицировать траекторию движения самосвала в зоне погрузки, а также в автоматическом режиме определять положение экскаватора на основе применения методов пространственной ориентации объектов.
Среди альтернативных методов определения положения объектов для диспетчеризации и маршрутизации транспортных участков можно выделить два подхода – определение положения объекта на местности (используется выделенный участок известного размера с привязкой к объекту на местности) и в геодезических системах координат, таких как WGS-84, ПЗ-90 и их аналоги [30]. При этом координаты объекта могут быть связаны с координатами в геодезических системах координат.
Из совокупности методов, обеспечивающих определение координат объектов в геодезических системах координат, можно выделить астрономическую навигацию [31], идентификацию объектов на местности машинным зрением [7, 32] и системы определения положения в реальном времени на основе беспроводных технологий передачи данных [33-35].
Астрономическая навигация – один из старейших способов определения координат объектов. В современном мире астрономическая навигация используется как запасной метод при определении координат на море и в воздухе [31]. Прогресс в области машинного зрения, рост вычислительной мощности компактных ЭВМ и поиск решений по замещению ГНСС в зонах нестабильной работы вернули интерес исследователей к астронавигации. В результате этого начали появляться прототипы, совмещающие методы астронавигации и машинного зрения, воплощенные в компактных устройствах с невысокой стоимостью [20].
Определение положения объектов идентификацией на местности машинным зрением является группой методов с различными подходами, как к сбору и формированию базы данных объектов на земной поверхности, распознавание которых с целью определения координат необходимо собрать, так и к обнаружению и идентификации объектов [7, 32]. В целом названная группа методов позволяет из потока видеоданных выделить объект, имеющий точно известные координаты в геодезических системах координат, и привязать к нему положение беспилотного транспортного средства, с которого ведется наблюдение системой машинного зрения [7, 32].
Среди методов определения положения в реальном времени на основе беспроводных технологий передачи данных в качестве основного можно выделить определение координат по триангуляции сигналов базовых станций GSM-связи [33], причем другие методы, входящие в данную группу, чаще используются для определения координат в локальных координатных системах [36-38]. В таких системах для определения координат объектов используются измерения сигналов точек доступа к сети Wi-Fi [39-41], передатчиков Bluetooth, Active RFID и UWB [36, 37]. Также применяются комбинированные методы, основанные на машинном зрении [42, 43].
Реализация методик определения координат в локальной координатной системе, основанных на измерении сигнала точек доступа к сети Wi-Fi; Bluetooth-, Active RFID- и UWB-передатчиков, имеет несколько подходов, и все они, как правило, основаны на измерении мощности сигнала [35, 41, 44]. В [41] представлен подход, при котором производится предварительная запись параметров сигнала в каждом квадрате локальной системы координат, а в [35] авторы указывают, что расстояние до точки доступа к сети Wi-Fi, установленной в месте с известными координатами, рассчитывается, исходя из мощности фиксируемого сигнала.
С применением механических измерительных приборов астронавигации и проведением всех измерений вручную достигается точность примерно в 1 морскую милю (1852 м) или ±1 угловую минуту [31, 45], что используется на морском и воздушном транспорте как резервный метод определения координат судна. Применение современных технологий, таких как машинное зрение и нейросетевой анализ изображений, позволило на базе актуального одноплатного компьютера без использования сложных механических и оптических систем разработать компактное астронавигационное устройство, теория и принципы работы которого описаны в [46, 47]. Действующий образец астронавигационного устройства с точностью позиционирования практически в два раза выше, чем при использовании ручного метода (1050 м), описан в [20]. При этом известна и описана в литературе навигационная система NAS-14V2, разработанная в США в 60-х годах ХХ в., которая позволяла с использованием астронавигации определять координаты с точностью до 90 м [48]. Несмотря на прогресс, за столетия применения метод определения координат по положению небесных тел не позволяет достигнуть точности, сопоставимой с ГНСС, и имеет серьезный недостаток для использования на наземном транспорте – необходимость постоянной видимости небесных тел на небосводе, по положению которых определяются координаты позиционируемого объекта [20].
Практикуются разные подходы к определению координат беспилотных транспортных средств с применением методов машинного зрения на местности с известными координатами. В [32] авторами предлагается формировать базу объектов для идентификации с помощью космических снимков, которые в большом объеме остаются после дистанционного зондирования земной поверхности из космоса. В [7] авторы предлагают создавать на поверхности специальные маркеры с точной привязкой к геодезическим координатным системам, аналогичные описанным в [49]. В том числе рассматривается и вариант оборудования дорог специальными маркерами, которые распознаются машинным зрением (так называемые умные дороги) [50] с применением масок и контуров [51]. На данный момент подобные системы навигации находятся в стадии разработки и имеют значительный потенциал развития [7, 32]. Универсальность данной группы методов определения координат позволяет тестировать их на масштабных моделях. Машинное зрение имеет ряд особенностей применения в условиях постоянно изменяющегося окружения из-за необходимости определения координат стационарных неизменяемых объектов, однако показывает эффективность при совместной работе со вспомогательными наводящими и подстраивающими устройствами и системами [25, 43].
Другая группа альтернативных методов определения положения объектов – определение положения в реальном времени на основе беспроводных технологий передачи данных. Для определения координат объекта (в случае сотового телефона или модема) в геодезических системах координат хорошо подходят только методы, основанные на изучении сигналов от базовых станций GSM-связи [33], преимущественно используются методики, построенные на триангуляции сигналов базовых станций GSM-связи [33].
Применение методов на основе технологии Bluetooth снижает погрешность в определении позиционирования объекта до 1-2 м [35, 41]. Схожие показатели погрешности обеспечивает технология Active RFID – 2 м [35, 41]. Наиболее точным решением с погрешностью около 0,3 м является метод, основанный на использовании технологии UWB [35, 41]. При этом дальность работы относительно базовой станции составляет менее 100 м для всех перечисленных методов [35, 41], что является недостаточным для использования их в АСУД. На 2025 г. Государственной комиссией по радиочастотам возможность применения методов на основе UWB на территории Российской Федерации официально не подтверждена.
В результате анализа особенностей допустимых для аппаратной реализации в АСУД методов выявлены их достоинства и недостатки с точки зрения применения в горно-добывающей промышленности для решения задач диспетчеризации и навигации в рамках технологических участков для работы высокоавтоматизированных транспортных средств без применения навигационного оборудования. На основе существующих методов предложен авторский подход к определению положения техники на горно-добывающих предприятиях с помощью комбинации радиопеленгации, машинного зрения и лазерной дальнометрии. Концептуально подход заключается в последовательном применении радиопеленгационной аппаратуры и системы машинного зрения для устройств определения положения подвижного объекта относительно стационарного в пределах локальной системы координат с последующим применением средств лазерной дальнометрии и определением угловых перемещений.
Обсуждение результатов
Задача определения координат экскаватора является технологическим запросом, направленным на снижение простоев и повышение коэффициента готовности горных машин для открытых работ. Входными данными для решения исследовательской задачи принято требование обеспечения погрешности позиционирования не более 1 м на каждые 200 м расстояния до подвижного объекта (экскаватор), перемещающегося внутри выделенной локальной площадки с ограниченными размерами относительно стационарного (мачта въездных ворот). Для площадки, к которой применена локальная система координат, установлены ограничения – площадка, на которой осуществляется навигация, имеет ровную поверхность (спроектирована в соответствии с требованиями нормативной документации) и уклон не более 5 %. Значительные перепады высот поверхности площадки, превышающие нормативные значения, могут привести к повышению погрешности и неработоспособности предложенного подхода.
Для решения задачи введена локальная система координат, связанная со стационарным объектом, относительно которого определялись координаты подвижного. С учетом допущения, что выделенная площадка ровная и не имеет перепадов высот, для локальной площадки предложено использовать декартову систему координат. Так как задача определения координат рассматривается в контексте управления АСУД транспортным средством, в качестве неподвижного объекта, относительно которого определяются координаты подвижного объекта, определены въездные ворота на участок. Въездные ворота представляют собой две мачты, устанавливаемые на правой и левой обочинах технологической дороги, с которой осуществляется въезд на участок, так, чтобы линия, проведенная через центры мачт въездных ворот, была строго перпендикулярна дорожному полотну.
Мачты въездных ворот являются опорными точками для локальной координатной системы на участке. Таким образом, на весь участок накладывается виртуальная сетка с требуемым шагом. Через центр каждой из мачт ворот проходит виртуальная ось абсцисс. Точка пересечения оси абсцисс и ординат выбирается с таким расчетом, чтобы весь участок располагался в первой четверти координатной плоскости, которую образуют виртуальные оси. Расстояние от точки пересечения виртуальных координатных осей до центра мачты въездных ворот, из которого будет строиться гипотенуза прямоугольного треугольника, задается при построении виртуальных осей.
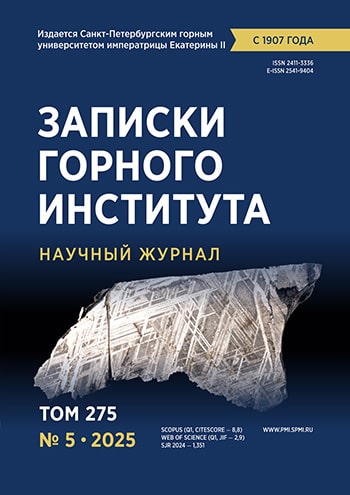
Для определения координат в декартовой системе применен графический метод решения аналитической задачи. Последовательность действий при определении координат подвижного объекта в декартовой системе координат, вписанной в выделенную локальную площадку, продемонстрирована на рис.1.
С помощью графического метода показано, что любая точка, расположенная в первой четверти координатной плоскости и не принадлежащая координатным осям, может быть вершиной прямоугольного треугольника, одна сторона которого будет расположена на виртуальной оси абсцисс. Тогда гипотенузой данного треугольника будет отрезок, отложенный от центра одной из мачт до точки, координаты которой требуется определить. После измерения угла между гипотенузой и осью абсцисс рассчитываются длины двух неизвестных катетов исходя из свойств прямоугольного треугольника. Тогда координатой точки в локальной системе координат будет расстояние от точки пересечения координатных осей до ее проекции на оси. Таким образом, для определения координаты точки на локальном участке необходимо измерить гипотенузу и угол между гипотенузой и виртуальной осью абсцисс, что формирует две измеряемые величины.
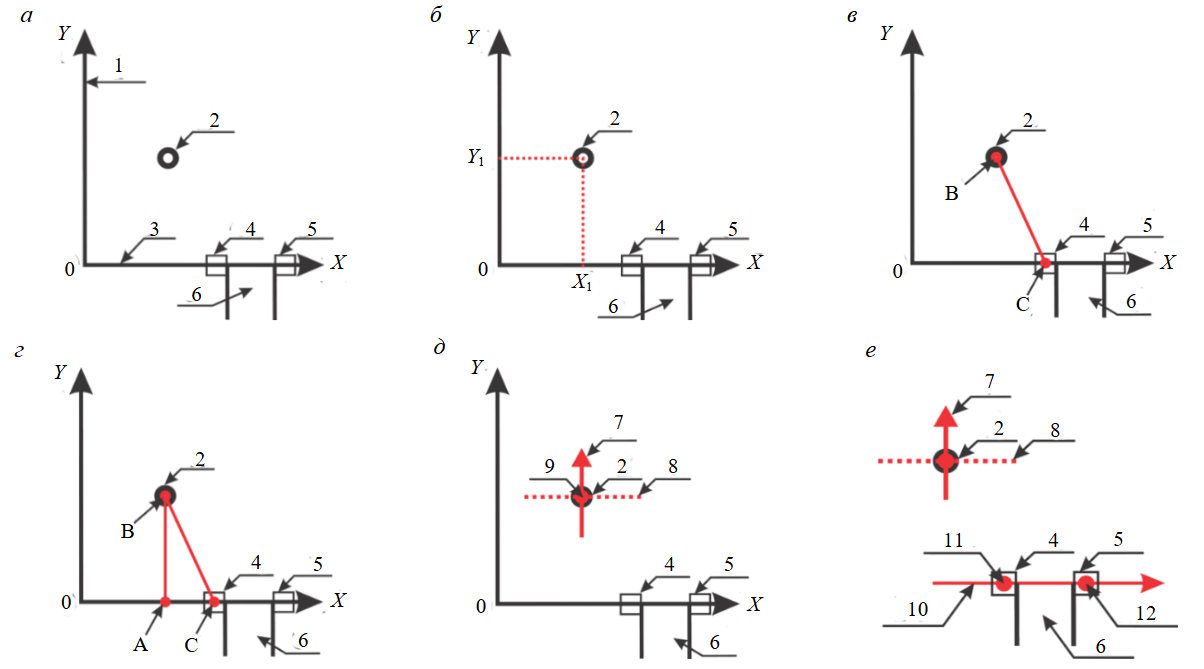
Рис.1. Последовательность определения координат подвижного объекта в декартовой системе координат на выделенной локальной площадке: а – расположение виртуальных координатных осей и мачт въездных ворот относительно технологической дороги; б – пример определения координат подвижного объекта (координаты Х1, Y1); в – расположение гипотенузы СВ виртуального треугольника между устройствами определения координат; г – расположение виртуальных линий АВ и AC (координаты подвижного объекта); д – пример расположения на подвижном объекте нулевой точки энкодера в устройстве определения координат; е – пример нулевого положения энкодера устройства определения координат в мачте въездных ворот
1 – виртуальная ось 0Y; 2 – подвижный объект; 3 – виртуальная ось 0Х; 4 – левая мачта въездных ворот; 5 – правая мачта въездных ворот; 6 – технологическая дорога; 7 – нулевое положение энкодера устройства определения координат на подвижном объекте; 8 – продольная ось подвижного объекта; 9 – расположение энкодера системы определения координат на подвижном объекте; 10 – нулевое положение энкодера устройства определения координат в левой мачте въездных ворот; 11 – расположение энкодера системы определения координат в центре левой мачты въездных ворот; 12 – центр правой мачты въездных ворот
Расстояние между объектом, координаты которого требуется определить, и мачтой въездных ворот предложено измерять с использованием метода лазерной дальнометрии, что может обеспечить погрешность измерения на дистанции в 200 м менее 0,005 м для современных моделей устройств. Также рис.1, г позволяет понять, что наибольшую погрешность в определении координат подвижного объекта оказывает разрешающая способность энкодера при измерении угла АСВ. В связи с этим для определения достаточной точности энкодера рассчитаны предельные отклонения значений проекций точки А при измерении угла АСВ и получена диаграмма зависимости этих отклонений в расчетном размере отрезка АВ (координата оси 0Y) от разрешающей способности энкодера на расстоянии 200 м до подвижного объекта (рис.2). При этом стоит учитывать, что стоимость энкодера возрастает в зависимости от его разрешающей способности – количества точек измерения (равных шагов) на один оборот.
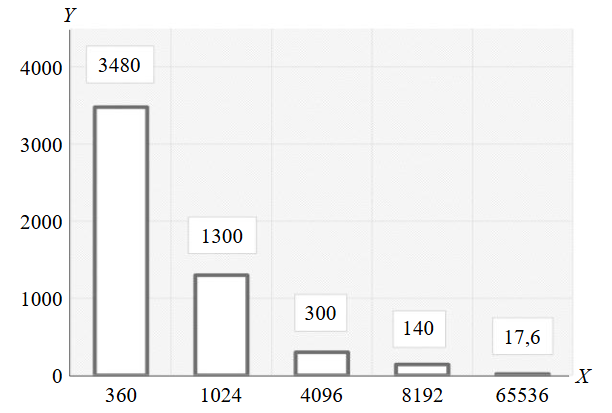
Рис.2. Диаграмма зависимости отклонений значений проекций точки А при измерении угла АСВ в расчетном размере отрезка АВ (координат оси 0Y) от разрешающей способности энкодера на расстоянии 200 м до подвижного объекта; Х – типовые значения разрешающей способности выпускаемых абсолютных энкодеров, шагов на оборот; Y – предельное отклонение от расчетного расстояния до подвижного объекта между шагами энкодера при удалении на 200 м, мм
Значения второй измеряемой величины – угла между осью абсцисс и гипотенузой треугольника предлагается измерять абсолютным энкодером, использующим оптико-механический метод измерения, при котором для каждого положения вала предоставляется уникальный цифровой код положения, считываемый оптической системой с кодового диска.
Далее на основе полученного значения угла и измеренного лазерным дальномером расстояния до объекта выполняется вычисление координат объекта Х и Y.
Радиопеленгационный метод и машинное зрение при последовательном применении позволяют сориентировать моторизированную платформу, оснащенную лазерным дальномером и абсолютным энкодером измерения описанных величин (гипотенузы прямоугольного треугольника и угла между гипотенузой и катетом, лежащем на оси абсцисс).
На подвижном объекте устанавливается массив чувствительных фотодиодов, на которые наводится луч лазерного дальномера. Для упрощения работы алгоритмов машинного зрения предлагается установить по периметру метки яркие точечные источники света. С помощью радиопеленгационного метода производится первичное наведение моторизированной платформы, в состав которой входят лазерный дальномер и видеокамера системы машинного зрения. Такой подход позволяет значительно уменьшить размер зоны интереса для машинного зрения. При этом стоит учитывать, что погодные условия могут вносить искажения в результаты и требовать разработки дополнительных мероприятий и технических средств для компенсации их влияния. При отказе одного из компонентов средствами самодиагностики должен подаваться сигнал тревоги.
Экспериментальная проверка предложенной концепции выполнена в моделируемых условиях. Натурные исследования, связанные с радиопеленгационными измерениями, проведены на открытой местности, удаленной от границы города более чем на 40 км, вне зоны влияния высоковольтных линий электропередачи и базовых станций сотовых операторов по методике:
- Установка приемного устройства в прямой видимости на передающее устройство.
- Измерение точностных характеристик азимута отклонения угла прихода сигнала для дистанций от 1 до 50 м при использовании амплитудной модуляции, бинарной фазовой манипуляции и квадратурной фазовой манипуляции.
- Выполнение поворота вправо и оценка отклонения направления от передающего модуля. Измерение точностных характеристик азимута отклонения угла прихода сигнала для дистанций от 1 до 50 м при использовании амплитудной модуляции, а также бинарной фазовой и квадратурной фазовой манипуляций.
- Возврат приемного устройства в зону прямой видимости. Измерение точностных характеристик азимута отклонения угла прихода сигнала для дистанций от 1 до 50 м при использовании амплитудной модуляции, бинарной фазовой и квадратурной фазовой манипуляций.
- Выполнение пунктов 1-4 при перемещении приемного устройства влево.
На рис.3 приводятся пеленгационные спектры углов направления сигнала в режиме работы бинарной фазовой манипуляции. В ходе эксперимента использована фазированная антенная решетка, в состав которой входило четыре штыревые антенны. Значения углов получены на основе метода разницы фаз сигнала на каждой принимающей антенне алгоритмом MUSIC (MUltiple SIgnal Classification). Результаты точностных характеристик использованных видов модуляций представлены в таблице.
Рис.3. Фрагменты лицевых панелей во время полевых исследований: а – прямая видимость объекта, азимут 90°; б – объект расположен справа под углом 120°; в – объект расположен слева под углом 70°; г – объект расположен под углом 148°; Х – мощность сигнала, дБм; Y – пеленгационный спектр угла направления сигнала, град
В ходе проведения эксперимента наблюдалось периодическое отклонение азимута угла в пределах от 35 до 50° для амплитудной модуляции и от 10 до 15° при генерации квадратурной фазовой манипуляции. Расстояние от приемного до передающего устройства стационарного источника сигнала варьировалось от 1 до 50 м, при этом точностные характеристики азимута угла отклонения для бинарной фазовой манипуляции изменялись в пределах отклонений 5-7°. Данный метод имеет потенциал в комбинации с машинным зрением для определения координат объектов в локальной системе координат.
Далее в ходе проведенных экспериментов в лабораторных условиях проведено тестирование позиционирования камеры машинного зрения по метке с установленными на ней точечными источниками света – координатными маркерами позиционирования (КМП). Изображение маркера представляет собой геометрическую фигуру (окружность) и с позиции методов машинного зрения является вектор-градиентом в контурных точках [29] с ярко выраженными пикселями внутри контура. Наиболее точным инструментом определения геометрического соответствия контуров (Shape Detection) заданной фигуры выбран алгоритм обобщенного преобразования Хафа.
Точностные характеристики видов модуляции
|
Расстояние до источника сигнала, м |
Азимут угла источника радиосигнала, град |
||||
|
Вид модуляции |
|||||
|
Амплитудная модуляция |
Среднеквадратическое отклонение |
Бинарная фазовая манипуляция |
Квадратурная фазовая манипуляция |
Среднеквадратическое отклонение |
|
|
1 |
– |
– |
– |
– |
– |
|
2 |
35-40 |
1,87 |
5 |
10-15 |
2,02 |
|
3 |
35-41 |
2,27 |
5 |
11-15 |
1,63 |
|
4 |
32-40 |
4,85 |
5 |
9-15 |
2,44 |
|
5 |
31-39 |
3,02 |
6 |
12-16 |
1,35 |
|
6 |
32-42 |
3,84 |
5-6 |
10-15 |
1,89 |
|
7 |
32-35 |
1,05 |
3 |
11-16 |
2,02 |
|
8 |
33-36 |
1,03 |
5 |
9-14 |
1,62 |
|
9 |
39-45 |
3,36 |
6 |
10-14 |
1,58 |
|
10 |
36-47 |
4,32 |
7 |
12-15 |
1,23 |
|
20 |
33-50 |
6,36 |
6 |
12-14 |
0,88 |
|
50 |
35-50 |
6,24 |
5 |
10-12 |
0,92 |
Установка центральной координатной точки в выделенном регионе опорных световых маркеров светового табло на видеоизображении определяется как центральная координата, относительно которой осуществляется распознавание контуров окружностей горизонтальных и вертикальных КМП (три слева или справа). На рис.4 приведен пример последовательности обработки изображения при определении контуров окружностей координатных маркеров и их количества в условиях освещенности 300 лм с расстояния 8 м камерой NI 1742 Smart Camera с характеристиками: тип матрицы – CCD монохромная, разрешение – 640×480 пикселей, размер пикселя – 7,4·10–6 м на 7,4·10–6 м, светосила объектива – F/1,4.
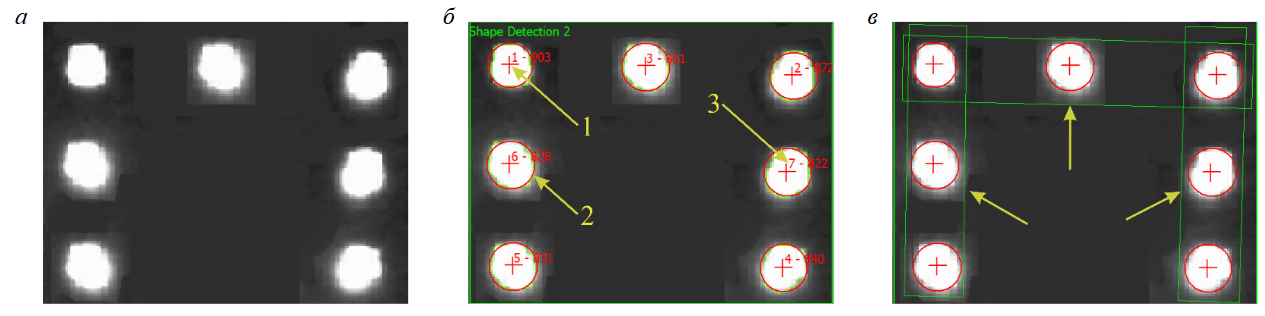
Рис.4. Последовательности обработки изображения при распознавании КМП: а – бинаризация исходного изображения (выделение серых тонов); б – изображение КМП после обработки алгоритмами Хафа; в – результат определения горизонтального и вертикального соответствий1 – результат распознавания центров окружностей; 2 – результат распознавания контуров окружностей; 3 – определение количества КМП
Процесс проверки положения контрольных точек КМП по горизонтали и вертикали системой машинного зрения определяет их так, чтобы количественный состав всех маркеров находился в прямоугольной области региона интереса как по горизонтали, так и по вертикали.
Контрольное положение определяется на основе региона интереса, прямоугольной выделенной области в потоке видеоданных. Соответственно, если контрольное положение точечных источников света определяется с отклонениями по горизонтали, выполняется его смещение на заданный угол. Таким же образом проверяется контрольное положение точечных источников света по вертикали. Фрагмент определения контрольного положения КМП приводится на рис.5. Так производится точное наведение лазерного дальномера и поворота вала абсолютного энкодера в сторону метки, установленной на подвижном объекте.
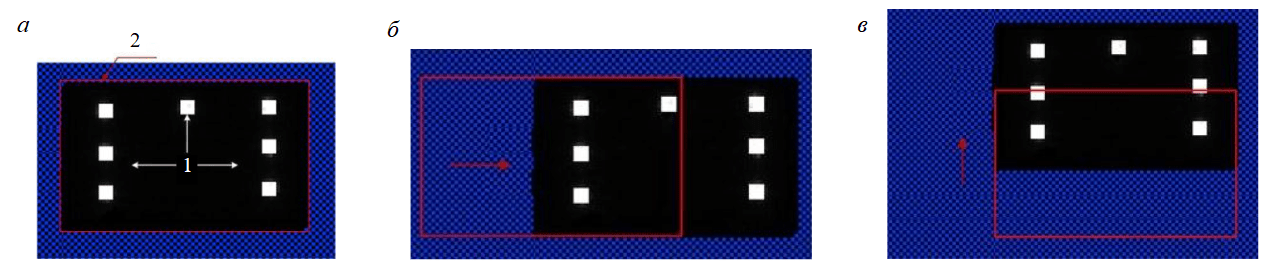
Рис.5. Проверка системой машинного зрения контрольного положения точечных источников света: а – контрольное положение КМП; б – определение региона интереса по горизонтали; в – определение региона интереса по вертикали
1 – контрольное положение маркеров; 2 – прямоугольная область региона интереса
Описанный метод определения координат показан на рис.6 в виде алгоритма, где S1 – начало; О1 – построение виртуальных осей координат; О2 – подготовка и запуск устройств определения координат; О3 – определение пеленга на подвижный объект; D1 – решение «Пеленг на подвижный объект найден?»; М1 – сообщение «Ошибка в обнаружении пеленга. Повторить поиск?»; Mi1 – ручной ввод «Да/Нет»; Е2 – конец/стоп; О4 – установка моторизованными приводами устройства определения координат на подвижном объекте и мачте въездных ворот вдоль одной оси по данным пеленга; О5 – подстройка моторизованными приводами направления по данным системы машинного зрения; О6 – настройка моторизованными приводами точного направления с помощью массива чувствительных фотодиодов и лазерного излучателя; О7 – измерение лазерным дальномером отрезка СВ (см. рис.1, в) и угла поворота лазерного дальномера АСВ (см. рис.1, г) энкодером устройства определения координат в левой мачте въездных ворот; О8 – расчет координат подвижного объекта; Ou1 – ввод координат подвижного объекта в систему управления.
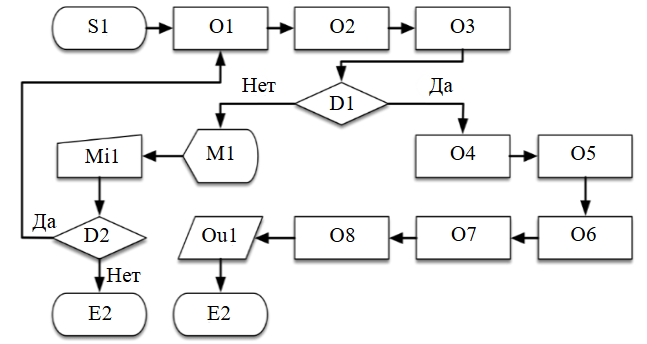
Рис.6. Алгоритм определения координат подвижного объекта в декартовой системе координат на выделенной локальной площадке
Таким образом, предложенный подход, основанный на применении совокупности методов машинного зрения, радиопеленгации, лазерной дальнометрии и средств определения угловых перемещений с достаточной разрешающей способностью, позволяет определять положение техники с погрешностью позиционирования не более 1 м на каждые 200 м расстояния между объектами.
Заключение
Анализ наиболее распространенных классических и альтернативных методов позиционирования объектов показал актуальность разработки способов точного определения координат техники на автоматизированных участках без использования спутниковой навигации.
Предложенный и описанный способ взаимной ориентации объектов в локальной системе координат на примере определения местоположения стационарного объекта относительно подвижного, заключающийся в использовании системы машинного зрения и комплекса вспомогательного оптического и пеленгационного оборудования с помощью моторизированных поворотных опор, позволяет при совокупном применении алгоритмов машинного зрения, радиопеленгационного метода на основе алгоритма MUSIС и средств лазерной дальнометрии обеспечить решение задач определения координат объектов. Машинное зрение с применением метода Хафа в распознавании КМП определяет заданное количество световых маркеров в зоне установленного региона интереса.
Предложенный способ определения координат погрузочной машины на основе применения методов машинного зрения, пеленгационного метода и средств лазерной дальнометрии показал работоспособность предлагаемых решений. В совокупности описанные решения могут быть рассмотрены как база для построения цифровых двойников экскаваторно-автомобильного комплекса и применяться для решения задач снижения простоев, повышения безопасности и эффективности транспортной логистики горно-добывающих предприятий.
Литература
- Дамрин М.Е. Оценка производительности и повышение эффективности работы автотранспортной техники на открытых горных работах // Транспортное, горное и строительное машиностроение: наука и производство. 2024. № 27. С. 99-106. DOI: 10.26160/2658-3305-2024-27-99-106
- Бураков А.М., Панишев С.В., Алькова Е.Л., Хосоев Д.В. Опыт применения гидравлических экскаваторов в сложных горно-геологических и климатических условиях // Горная промышленность. 2022. № 2. С. 90-96. DOI: 10.30686/1609-9192-2022-2-90-96
- Клебанов Д.А., Макеев М.А., Сиземов Д.Н. Применение автономной и дистанционно-управляемой техники на открытых горных работах // Горная промышленность. 2020. № 6. P. 14-18. DOI: 10.30686/1609-9192-2020-6-14-18
- Li Zhang, Wenxuan Shan, Bin Zhou, Bin Yu. A dynamic dispatching problem for autonomous mine trucks in open-pit mines considering endogenous congestion // Transportation Research Part C: Emerging Technologies. 2023. Vol. 150. № 104080. DOI: 10.1016/j.trc.2023.104080
- Sizemov D.N., Temkin I.O., Deryabin S.A., Vladimirov D.Ya. On some aspects of increasing the target productivity of unmanned mine dump trucks // Eurasian Mining. 2021. № 2. P. 68-73. DOI: 10.17580/em.2021.02.15
- Sishi M.N., Telukdarie A. Implementation of Industry 4.0 technologies in the mining industry – a case study // International Journal of Mining and Mineral Engineering. 2020. Vol. 11. Iss. 1. P. 1-22. DOI: 10.1504/IJMME.2020.105852
- Chuprov S., Belyaev P., Gataullin R. et al. Robust Autonomous Vehicle Computer-Vision-Based Localization in Challenging Environmental Conditions // Applied Sciences. 2023. Vol. 13. Iss. 9. № 5735. DOI: 10.3390/app13095735
- Cotroneo D., Russo S., Cornevilli F. et al. Implementing positioning services over an ubiquitous infrastructure // Second IEEE Workshop on Software Technologies for Future Embedded and Ubiquitous Systems, 11-12 May 2004, Vienna, Austria. IEEE, 2004. P. 14-18. DOI: 10.1109/WSTFES.2004.1300407
- Gaber T., El Jazouli Y., Eldesouky E., Ali A. Autonomous Haulage Systems in the Mining Industry: Cybersecurity, Communication and Safety Issues and Challenges // Electronics. 2021. Vol. 10. Iss. 11. № 1357. DOI: 10.3390/electronics10111357
- Nguyen H.A.D., Ha Q.P. Robotic autonomous systems for earthmoving equipment operating in volatile conditions and teaming capacity: a survey // Robotica. 2023. Vol. 41. Iss. 2. P. 486-510. DOI: 10.1017/S0263574722000339
- Hamada T., Saito S. Autonomous Haulage System for Mining Rationalization // Hitachi Review. 2018. Vol. 67. № 1. P. 87-92.
- Акл М.Н. Элементы методики модернизации спутниковой геодезической сети в геологически неустойчивом районе // Успехи современного естествознания. 2023. № 6. С. 113-121. DOI: 10.17513/use.38061
- Yastrebova A., Höyhtyä M., Boumard S. et al. Positioning in the Arctic Region: State-of-the-Art and Future Perspectives // IEEE Access. 2021. Vol. 9. P. 53964-53978. DOI: 10.1109/ACCESS.2021.3069315
- Lassila M. The Arctic mineral resource rush and the ontological struggle for the Viiankiaapa peatland in Sodankylä, Finland // Globalizations. 2021. Vol. 18. Iss. 4. P. 635-649. DOI: 10.1080/14747731.2020.1831818
- Dmitrieva D., Solovyova V. A Taxonomy of Mineral Resource Projects in the Arctic: A Path to Sustainable Financing? // Sustainability. 2024. Vol. 16. Iss. 11. № 4867. DOI: 10.3390/su16114867
- Серегин С.Н., Гасанова Х.Н., Тазетдинов Р.Р. Ресурсный потенциал российской Арктики: возможные грани соединения добычи полезных ископаемых и водных биоресурсов // Экономика, труд, управление в сельском хозяйстве. 2023. № 3 (97). С. 150-161. DOI: 10.33938/233-150
- Meggs R.W., Watson R.J. Spoofing and Jamming of GNSS Signals: Are They Real and What Can We Do About Them? // Proceedings of the International Ship Control Systems Symposium (iSCSS), 6-8 October 2020, Delft, Netherlands. Institute of Marine Engineering, Science and Technology, 2020. 8 p. DOI: 10.24868/issn.2631-8741.2020.005
- Zhijun Wu, Yun Zhang, Yiming Yang et al. Spoofing and Anti-Spoofing Technologies of Global Navigation Satellite System: A Survey // IEEE Access. 2020. Vol. 8. P. 165444-165496. DOI: 10.1109/ACCESS.2020.3022294
- Cardellach E., Elósegui P., Davis J.L. Global distortion of GPS networks associated with satellite antenna model errors // Journal of Geophysical Research: Solid Earth. 2007. Vol. 112. Iss. B7. № B07405. DOI: 10.1029/2006JB004675
- Teague S., Chahl J. An Algorithm for Affordable Vision-Based GNSS-Denied Strapdown Celestial Navigation // Drones. 2024. Vol. 8. Iss. 11. № 652. DOI: 10.3390/drones8110652
- Psiaki M.L., Humphreys T.E., Stauffer B. Attackers can spoof navigation signals without our knowledge. Here’s how to fight back GPS lies // IEEE Spectrum. 2016. Vol. 53. Iss. 8. P. 26-53. DOI: 10.1109/MSPEC.2016.7524168
- von Hünerbein K. Detection and Monitoring of Jamming and Spoofing of GPS/GNSS Signals in Harbours and Industrial Areas // The European Test and Telemetry Conference, 11-13 June 2024, Nuremberg, Germany. AMA Association for Sensors and Measurement, 2024. P. 54-60. DOI: 10.5162/ETTC2024/A3.2
- Keyuan Jiao, Maozhong Song, Xiaolong Tang et al. Two-Dimensional Differential Positioning with Global Navigation Satellite System Signal Frequency Division Relay Forwarding to Parallel Leaky Coaxial Cables in Tunnel // Applied Sciences. 2024. Vol. 14. Iss. 22. № 10288. DOI: 10.3390/app142210288
- Kundiladi M.S., Rahim S.M.S.A., Rishad M.S. Secure Autonomous Vehicle Localization Framework using GMCC and FSCH-KMC under GPS-Denied Locations // Annals of Emerging Technologies in Computing. 2024. Vol. 8. № 3. P. 64-74. DOI: 10.33166/AETiC.2024.03.001
- Кизилов С.А., Никитенко М.С., Худоногов Д.Ю. Техническая реализация способа определения положения экскаватора в забое без применения системы спутниковой навигации // Современная наука: актуальные проблемы теории и практики. Серия: Естественные и технические науки. 2024. № 12-2. С. 46-52. DOI: 10.37882/2223-2966.2024.12-2.11
- Захаров А.А., Тужилкин А.Ю., Веденин А.С. Алгоритм определения положения и ориентации трехмерных объектов по видеоизображениям на основе вероятностного подхода // Фундаментальные исследования. 2014. № 11-8. С. 1683-1687.
- Никитенко М.С., Худоногов Д.Ю., Попинако Я.В. Способ позиционирования автономного транспортного средства на основе машинного зрения и радиопеленгации // Современная наука: актуальные проблемы теории и практики. 2023. № 12-2. С. 84-86. DOI: 10.37882/2223-2966.2023.12-2.20
- Молодцов В., Куреев А. Экспериментальное исследование применимости алгоритма MUSIC для определения направления прихода сигнала // Информационные технологии и системы 2019 (ИТИС 2019): Сборник трудов 43-й междисциплинарной школы-конференции ИППИ РАН, 17-22 сентября 2019, Пермь, Россия. Институт проблем передачи информации им. А.А.Харкевича РАН, 2019. С. 123-129.
- Коробков М.А., Петров А.С. Методы и алгоритмы пеленга источников радиоизлучения // Электромагнитные волны и электронные системы. 2015. № 4. С. 3-32.
- Barzegari V., Edrisi A. Optimal number and location of parking facilities in presence of autonomous vehicles // Numerical Methods in Civil Engineering. 2022. Vol. 7. Iss. 1. P. 70-83. DOI: 10.52547/nmce.2022.401
- Mostafa A. The Principles of Celestial Navigation. Arab Academy for Science, Technology & Maritime Transport, 2019. 211 p.
- Крамаров С.О., Митясова О.Ю., Темкин И.О., Храмов В.В. Методология интеллектуальной навигации для управления автономными подвижными объектами на основе триангуляции Делоне // Горный информационно-аналитический бюллетень. 2021. № 2. С. 87-98. DOI: 10.25018/0236-1493-2021-2-0-87-98
- Bansal S.K. Advancements in Digital Forensics: A Quantitative Analysis of Cell Tower Triangulation Techniques // International Journal of Current Science Research and Review. 2024. Vol. 7. Iss. 10. P. 7947-7954. DOI: 10.47191/ijcsrr/V7-i10-54
- Zandbergen P.A. Accuracy of iPhone Locations: A Comparison of Assisted GPS, WiFi and Cellular Positioning // Transactions in GIS. 2009. Vol. 13. Iss. s1. P. 5-25. DOI: 10.1111/j.1467-9671.2009.01152.x
- Stewart J., Hassan M.N., Sudin S. Location Based Systems over Wi-Fi Networks: Current Challenges and Future Directions // 3rd International Conference on Advanced Materials Engineering & Technology, 4-5 December 2014, Ho Chi Minh, Vietnam. 2014.
- Lachvajderova L., Fiľo M. Real-Time Location Systems Across the Industries – Literature Review and Case Studies // Acta Mechanica Slovaca. 2024. Vol. 28. Iss. 3. P. 42-48. DOI: 10.21496/ams.2024.017
- Sullivan B.P., Ghafoorpoor Yazdi P., Thiede S. Total Cost of Ownership of Real-Time Locating System (RTLS) Technologies in Factories // Procedia CIRP. 2023. Vol. 120. P. 822-827. DOI: 10.1016/j.procir.2023.09.082
- Ермолаев В.Т., Семенов В.Ю., Флаксман А.Г. и др. Двумерная пеленгация со сверхразрешением в автомобильном MIMO радаре в условиях коррелированности целей // Электросвязь. 2022. № 8. С. 45-52. DOI: 10.34832/ELSV2022.33.8.006
- Yu-Chung Cheng, Yatin Chawathe, Anthony LaMarca, John Krumm. Accuracy characterization for metropolitan-scale Wi-Fi localization // MobiSys '05: Proceedings of the 3rd international conference on Mobile systems, applications, and services, 6-8 June 2005, Seattle, WA, USA. Association for Computing Machinery, 2005. P. 233-245. DOI: 10.1145/1067170.1067195
- Бугебрин Ш., Михайлов А.В., Казаков Ю.А. Контроль позиционирования ковша экскаватора с применением датчи-ков // Транспортное, горное и строительное машиностроение: наука и производство. 2024. № 25. С. 169-175. DOI: 10.26160/2658-3305-2024-25-169-175
- Núñez Fernández D. Implementation of a WiFi-based indoor location system on a mobile device for a university area // 2019 IEEE XXVI International Conference on Electronics, Electrical Engineering and Computing (INTERCON), 12-14 August 2019, Lima, Peru. IEEE, 2019. 4 p. DOI: 10.1109/INTERCON.2019.8853556
- Худоногов Д.Ю., Никитенко М.С., Кизилов С.А. Применение методов пеленгации в задачах ориентации автономных транспортных средств на закрытом технологическом участке // Современные наукоемкие технологии. 2023. № 12-2. С. 239-245. DOI: 10.17513/snt.39888
- Кизилов С.А., Никитенко М.С., Худоногов Д.Ю. Формализация задачи определения местоположения экскаватора в забое относительно карьерного самосвала без использования спутниковой навигации // Современные наукоемкие технологии. 2024. № 12. С. 41-47. DOI: 10.17513/snt.40242
- Ramtohul A., Khedo K.K. Mobile Positioning Techniques and Systems: A Comprehensive Review // Mobile Information Systems. 2020. Vol. 2020. № 3708521. DOI: 10.1155/2020/3708521
- Venkat R. Challenges to overcome limitations of human centric practices in celestial navigation at sea // International Journal of Health Sciences. 2022. Vol. 6. № S6. P. 11080-11093. DOI: 10.53730/ijhs.v6nS6.13034
- Teague S., Chahl J. Imagery Synthesis for Drone Celestial Navigation Simulation // Drones. 2022. Vol. 6. Iss. 8. № 207. DOI: 10.3390/drones6080207
- de Almeida Martins F., Carrara V., D’Amore R. Positionless Attitude Estimation With Integrated Star and Horizon Sensors // IEEE Access. 2024. Vol. 12. P. 2340-2348. DOI: 10.1109/ACCESS.2023.3348077
- Malkin R. Understanding the Accuracy of Astro Navigation // The Journal of Navigation. 2013. Vol. 67. Iss. 1. P. 63-81. DOI: 10.1017/S0373463313000520
- Olson E. AprilTag: A robust and flexible visual fiducial system // 2011 IEEE International Conference on Robotics and Automation, 9-13 May 2011, Shanghai, China. IEEE, 2011. P. 3400-3407. DOI: 10.1109/ICRA.2011.5979561
- Ryghaug M., Haugland B.T., Søraa R.A., Skjølsvold T.M. Testing Emergent Technologies in the Arctic: How Attention to Place Contributes to Visions of Autonomous Vehicles // Science & Technology Studies. 2022. Vol. 35. № 4. P. 4-21. DOI: 10.23987/sts.101778
- Ромашев А.О., Николаева Н.В., Гатиатуллин Б.Л. Формирование адаптивного подхода с применением технологии машинного зрения для определения параметров осаждения продуктов обогащения // Записки Горного института. 2022. Т. 256. С. 677-685. DOI: 10.31897/PMI.2022.77