Исследование комплекса факторов, оказывающих влияние на погрешность реализации маркшейдерской съемки горных объектов с применением геодезического квадрокоптера
- 1 — д-р техн. наук профессор Санкт-Петербургский Горный университет ▪ Orcid
- 2 — аспирант Санкт-Петербургский Горный университет ▪ Orcid
- 3 — канд. техн. наук доцент Санкт-Петербургский Горный университет ▪ Orcid

Аннотация
Выявлены и систематизированы факторы, оказывающие влияние на качественную и количественную составляющие результата маркшейдерской съемки в условиях открытых горных работ с применением квадрокоптера, а также определена математическая зависимость влияния факторов на конечную погрешность маркшейдерской съемки. После большого количества полевых наблюдений – многочисленных полетов геодезического квадрокоптера над горными объектами – сделано последующее математическое обоснование результатов аэрофотограмметрической маркшейдерской съемки, которое позволило проанализировать степень участия в итоговой точности съемки каждого из рассматриваемых факторов. Результаты настоящего исследования демонстрируют источник погрешностей, которые предоставляют маркшейдеру возможность рационально и компетентно производить предполетную подготовку и планирование полевых работ. Изучение и последующий учет факторов, оказывающих влияние на точность маркшейдерской съемки с применением беспилотного летательного аппарата, являются основой последующей разработки и формирования методики использования геодезического квадрокоптера в условиях открытой разработки полезных ископаемых.
Отсутствует
Введение
В настоящее время маркшейдерское дело идет по пути сокращения времязатрат на полевые работы [1, 2], однако камеральные работы усложняются из-за использования новых технологий съемки, методик и приборов. Информация обрабатывается с помощью все более современного программного обеспечения, требующего от маркшейдера как от инженера не только знания горно-технических процессов, но и навыков программирования и цифровой обработки полученных результатов [3, 4]. Примером этого является использование беспилотных технологий в маркшейдерском измерении горных объектов на открытых горных работах [5, 6].
Беспилотные летательные аппараты (БПЛА) находят все более широкое применение [7, 8] благодаря оперативности развертывания комплекса съемки [9, 10], возможности получения актуальной информации [11, 12], а также высокой рентабельности при съемке небольших территорий и объектов.
Аэрофотограмметрическая маркшейдерская съемка для профессионального картографирования местности и отображения действительной поверхности предъявляет повышенные требования к выходным данным, а именно к выдерживанию геометрических параметров съемки. Небольшие БПЛА – квадрокоптеры – экономичны [13, 14] и портативны, что делает их удобными для съемки горных объектов небольшой площади (не более 100 га) [15]. Аэрофотосъемка с помощью квадрокоптера не отличается от съемки с использованием самолетов [16], но производится с меньшей высоты и на меньших скоростях полета [17, 18].
Методики использования БПЛА развиваются высокими темпами [19, 20], но главный принцип каждой маркшейдерской съемки остается прежним – высокая точность измерений, соответствующая требованиям нормативных актов, и, следовательно, уменьшение погрешностей съемки [21-23].
Постановка проблемы
В настоящее время не сформированы нормы и правила применения беспилотных технологий на открытых горных работах [24, 25], за исключением инструкций по их использованию, предоставляемых предприятиями-изготовителями. Это говорит о необходимости исследований в данной области и создании математического обоснования применения квадрокоптера в горной промышленности [26, 27]. Грамотное и правильно выбранное теоретическое обоснование процесса аэрофотосъемки объектов с помощью квадрокоптеров будет способствовать формированию методики применения данной технологии в производственной деятельности маркшейдеров [28, 29].
Благодаря опыту выполненных полетов, а также испытаниям производителей аппаратуры в ходе настоящего исследования были определены субъекты исследования – решающие причины получения какой-либо погрешности при измерениях объектов и поверхностей с помощью квадрокоптеров [30].
Методология
Причинами, оказывающими значительное влияние на производительность квадрокоптера и выполнение аэрофотограмметрического измерения, были определены регулируемые и нерегулируемые параметры. Бифуркация факторов влияния обусловлена возможностью оказывать воздействие на параметры.
Регулируемые факторы:
- высота полета БПЛА, м (60, 80, 100, 120, 140);
- скорость полета БПЛА, м/с (5, 7, 9, 11, 13, 15);
- количество опознаков, шт. (0, 1, 2, 3);
- продольное и поперечное перекрытия снимков (55/75, 65/75, 75/85, 85/95).
Нерегулируемые (внешние) факторы:
- режим погоды (солнечно, облачно);
- время суток (освещенность) (утро, день, вечер);
- скорость ветра, м/с (2,5, 7,5, 12,5, 17,5);
- свойства поверхности (зачищенная поверхность, низкая растительность, кустарники, редколесье).
Для определения факторов, влияющих на погрешность аэрофотограмметрических измерений и конечные ошибки, было выполнено около тысячи полетов, имеющих каждый свое назначение (исходя из заданной параметризации и детерминированности факторов ошибок). Подборка параметров факторов влияния основывается на опыте полетов на местности, а не лабораторных испытаний [31]. Полевые работы были выполнены на месторождениях песков, песчано-гравийного материала и известняков Ленинградской области.
Уменьшение трудоемкости полевых работ маркшейдерских работ с использованием квадрокоптера есть главная особенность сдвига баланса «полевые работы + камеральная обработка» на современном этапе развития маркшейдерских измерений.
Полевые работы были выполнены с помощью геодезического квадрокоптера DJI Phantom 4 PRO – наиболее часто используемого специалистами для маркшейдерской съемки на горном объекте. Полевые работы разделяются на геодезическую и аппаратную части. Геодезическая представляет собой координатное определение положения опознавательных знаков, находящихся на территории снимаемого объекта (70-100 га) и составляющих жесткую фигуру (например, треугольник) используется три опознака, что рекомендуется инструкциями предприятий-изготовителей.
Следующий этап – выставление геодезического спутникового оборудования на известной точке в режиме статики для получения сырых данных rinex. Данные также можно приобрести у коммерческих организаций, обладающих сетью базовых референц-станций.
Для обработки полученных в результате маркшейдерского полета данных применялись программы TeoBox и Agisoft Metashape Pro. Точность маркшейдерской съемки соответствует требованиям инструкций по маркшейдерским измерениям, и при масштабе 1:1000 составляет 40 см, но, чаще всего точность съемки, количество расположения опознавательных знаков задается проектной документацией и техническим заданием.
Аппаратная часть состоит в выборе места взлета геодезического квадрокоптера (обычно центр снимаемого объекта), сборке БПЛА (открепление статических держателей, присоединение винтов), подключении пульта управления, проверке приема навигационного сигнала (прием сигналов от спутников ГЛОНАСС, GPS и т.д.), проверке работоспособности камеры, ее настройке в зависимости от окружающей среды (выставление фокусировки, исходя из высоты полета, яркости съемки в зависимости от погоды и солнечности времени суток).
Важной частью подготовки квадрокоптера к полету является калибровка, которая выполняется для его ориентирования на местности, определения нахождения относительно земной поверхности. Перед самим взлетом с помощью специализированных программ (если данная процедура не была осуществлена заранее) строится маршрут полета – задается высота полета (70-100 м). Данные величины рекомендуются инструкциями производителей и опытом практического использования геодезического квадрокоптера. При более низкой высоте существует опасность столкновения аппарата с лесным массивом или другими объектами из-за особенностей рельефа. При высоте больше 100 м теряются четкость, яркость и цвет фотографий, поскольку фотоаппаратура геодезического квадрокоптера имеет постоянную величину апертуры и ширины диафрагмы. В заключение автоматически проверяется работоспособность всех главных функций геодезической аппаратуры и происходит полет.
Каждый эксперимент представляет собой отдельное маркшейдерское измерение снимаемого объекта (участки площадью ≈ 70-100 га). Точность проведенных работ определяется положением созданной модели относительно координат опознавательных знаков. Таким образом, при условии приведения координатного определения опознаков к истинной величине, определяется только точность маркшейдерского измерения снимаемого объекта, исключая другие случайные ошибки. Требования к точности выполнения маркшейдерской съемки с помощью геодезического квадрокоптера соответствуют рядовым значениям для маркшейдерских измерений на открытых горных работах, представленным в действующей регламентирующей документации.
Камеральная обработка результатов полевых полетов (аэрофотограмметрических маркшейдерских измерений) было осуществлено в программе Agisoft Metashape Pro. Многочисленная и межфакторная выборка полученных результатов погрешностей маркшейдерской съемки с помощью БПЛА была инициализирована и подготовлена для последующего анализа.
Для регистрации, описания и анализа данных наблюдений и экспериментов с целью построения вероятностных моделей массовых случайных явлений существуют многочисленные методики математической обработки [18]. Учитывая математическую природу конкретных результатов наблюдений, одной из целей исследования являлось выявление степени воздействия каждого фактора влияния на конечную погрешность, и в итоге – на окончательный результат аэрофотограмметрической маркшейдерской съемки. Эта задача была решена с помощью двухфакторного дисперсионного анализа, который заключался в сопоставлении межгрупповой и внутригрупповой дисперсий и формировании на основе этого соотношения суждения о влиянии и роли каждого изучаемого фактора.
Главным отличием двухфакторного дисперсионного анализа от однофакторного является одновременное оценивание влияния пары факторов. Поскольку в рассматриваемой серии экспериментов присутствует достаточно большое число уровней каждого фактора, для реализации двухфакторного анализа был применен пакет анализа данных MS Excel. В двухфакторном эксперименте факторы А и В считаются взаимодействующими, если эффект фактора А зависит от уровня фактора В. Дисперсионный анализ тесно связан с соответствующим планированием эксперимента.
Проверялось влияние двух независимых переменных (факторов влияния) на зависимую переменную (погрешность измерения). Результаты данного масштабного и существенного в своих математических расчетах двухфакторного дисперсионного анализа эмпирических измерений аэрофотограмметрических полетов представлены в табл.1. Заключительным показателем математического обоснования являются коэффициенты детерминации, показывающие долю вариации результативного признака, объясненную вариацией факторного признака.
Таблица 1
Результаты двухфакторного дисперсионного анализа
|
Пары факторов |
Коэффициент детерминации фактора 1, % |
Коэффициент детерминации фактора 2, % |
|
Высота/скорость БПЛА |
97,6 |
2,0 |
|
Высота БПЛА/опознаки |
62,6 |
21,9 |
|
Высота БПЛА/перекрытия |
39,3 |
38,7 |
|
Высота БПЛА/свойства поверхности |
68,4 |
14,1 |
|
Высота БПЛА/скорость ветра |
80,1 |
11,2 |
|
Высота БПЛА/режим погоды |
72,3 |
15,6 |
|
Высота БПЛА/время суток (освещенность) |
65,8 |
16,0 |
|
Скорость БПЛА/опознаки |
10,0 |
65,1 |
|
Скорость БПЛА/перекрытия |
8,1 |
76,8 |
|
Скорость БПЛА/свойства поверхности |
35,8 |
49,9 |
|
Скорость БПЛА/скорость ветра |
43,2 |
51,5 |
|
Скорость БПЛА/режим погоды |
28,5 |
62,2 |
|
Скорость БПЛА/время суток (освещенность) |
20,4 |
65,1 |
|
Опознаки/перекрытия |
40,2 |
55,2 |
|
Опознаки/ свойства поверхности |
68,1 |
21,2 |
|
Опознаки/скорость ветра |
67,5 |
14,5 |
|
Опознаки/режим погоды |
55,2 |
34,8 |
|
Опознаки/время суток (освещенность) |
61,3 |
25,4 |
|
Перекрытия/ свойства поверхности |
70,1 |
14,5 |
|
Перекрытия/скорость ветра |
88,1 |
10,2 |
|
Перекрытия/режим погоды |
72,4 |
15,8 |
|
Перекрытия/время суток (освещенность) |
66,1 |
20,8 |
|
Свойства поверхности/скорость ветра |
45,2 |
35,8 |
|
Свойства поверхности/режим погоды |
56,8 |
28,9 |
|
Свойства поверхности/время суток (освещенность) |
60,5 |
30,2 |
|
Скорость ветра/режим погоды |
34,1 |
58,9 |
|
Скорость ветра/время суток (освещенность) |
32,1 |
66,0 |
|
Режим погоды/время суток (освещенность) |
40,8 |
56,1 |
Был изучен эффект влияния каждых двух переменных на погрешность маркшейдерских измерений. Существенные факторы влияния, значения которых представляют особый интерес для последующей математической обработки, в табл.1 выделены цветом. Первоначальные результаты опыта указывают на прецизионность исследований и выделяют особые параметры реализованных экспериментов (рисунок).
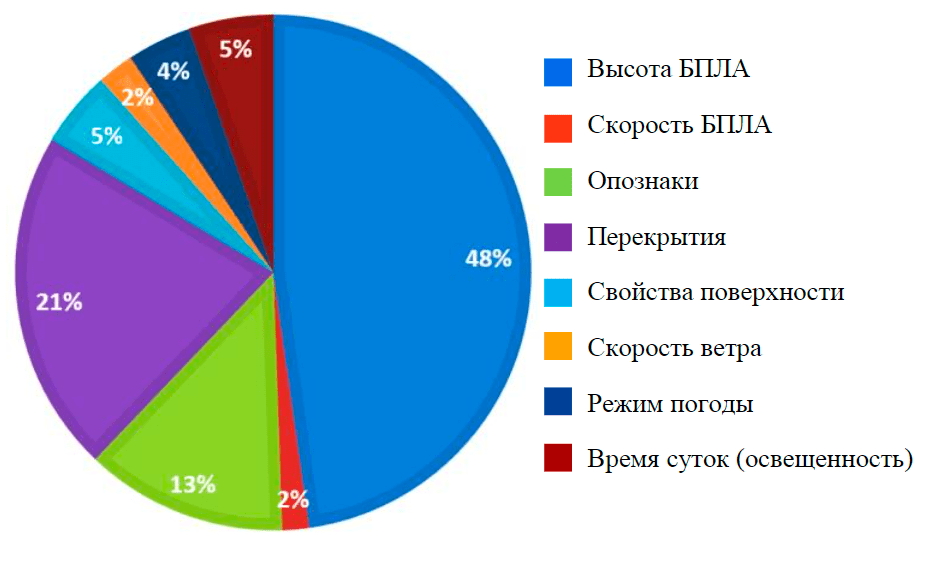
Степень влияния изучаемых факторов на точность съемки квадрокоптером
Очевидна степень влияния факторов на погрешность аэрофотограмметрических измерений. Абсолютно доминантным параметром является высота полета БПЛА, высокую степень важности, в свою очередь, имеют составляющие перекрытия снимков и количество опознаков. Остальные параметры оказывают меньшее влияние и лишь несут в себе математические подробности в общей составляющей конечной ошибки. Но, несмотря на преобладание определенных факторов, нельзя пренебрегать прочими параметрами – скоростью ветра и БПЛА, свойствами поверхности, погодными условиями и временем суток. Тем самым можно допустить типичную ошибку отбора, распространенную при анализе математических данных. Роль второстепенных параметров не так велика в своей математической величине, однако, учитывая прецизионность расчетов и их суммарное влияние на конечную погрешность, роль достаточно значима.
Важнейшим выводом представленного исследования является то, что факторы, оказывающие наибольшее влияние на точность съемки, - регулируемые, т.е. маркшейдер при подготовке к полевым измерениям на горных объектах может уменьшать погрешность благодаря пониманию соотношения факторов влияния при формировании ошибки полета БПЛА.
Следующим шагом на пути к обоснованию и разработке методики использования квадрокоптера для маркшейдерских съемок является создание программного продукта, способного выполнять предварительную (предполетную) оценку точности маркшейдерских измерений. Был проведен регрессионный анализ модели, представленной 500 полетами, с использованием классического метода наименьших квадратов
где у^i, уi – спрогнозированное и фактическое значения отклика в точке i соответственно.
В модели, реализованной в программной среде Minitab 20.2, учтены категориальные факторы (свойства поверхности, режим погоды, время суток), квадратичные влияния числовых факторов, а также их парные взаимодействия. Дальнейшее усложнение модели принято нерациональным ввиду высокой мультиколлинеарности (взаимного влияния) факторов.
Для учета влияния категориальных факторов с более чем двумя значениями их преобразовали в фиктивные переменные, используя кодировку –1; 0; 1, (табл.2, 3). Категориальный фактор «режим погоды», принимающий лишь два значения (солнечно S/облачно O), кодировался бинарно.
Таблица 2
Кодировка фактора «время суток»
|
Значение фактора |
Значение закодированного фактора |
|
|
Вечер |
День |
|
|
Вечер V |
1 |
0 |
|
День D |
0 |
1 |
|
Утро Y |
–1 |
–1 |
Таблица 3
Кодировка фактора «свойства поверхности»
|
Значение фактора в наблюдении |
Значение закодированного фактора |
||
|
Зачищенная поверхность |
Кустарники |
Низкая растительность |
|
|
Зачищенная поверхность Z |
1 |
0 |
0 |
|
Кустарники K |
0 |
1 |
0 |
|
Низкая растительность NR |
0 |
0 |
1 |
|
Редколесье R |
–1 |
–1 |
–1 |
Для того, чтобы дать качественную оценку связи, учитывающей как численные, так и категориальные факторы, использовалась шкала Чеддока, согласно которой коэффициент детерминации (%) 10-30 соответствует слабой связи между исследуемыми параметрами, 30-50 – умеренной, 50-70 – заметной, 70-90 – высокой, а 90-99 – весьма высокой. Шкала условна, но широко используется при построении многофакторных математических моделей.
Первоначально была исследована линейная модель, однако она описывала зависимость недостаточно точно (коэффициент детерминации составил 63,7 %, что соответствует заметной связи по шкале Чеддока), а график стандартизированных остатков показал, что функция изменяется
нелинейно, поэтому в состав модели включили квадратичные влияния всех числовых факторов, а также все возможные взаимодействия факторов между собой; кроме этого проводили преобразования отклика для нормализации остатков. В результате описанного моделирования и пошагового исключения незначимых взаимодействий и факторов получили следующую модель:
где Н – высота выполняемого полета, м; V1, V2 – скорости квадрокоптера и ветра соответственно, м/с; P1, P2 – величины продольного и поперечного перекрытия соответственно, %; N – количество опознаков, шт.
Формула (2) представлена в общем виде, и для каждого сочетания факторов будет иметь упрощенный вид. Каждый из исследованных категориальных факторов (свойства поверхности, режим погоды, время суток) принимает значения 0 или 1, т.е. в итоговой формуле задается бинарно для упрощения восприятия и использования. Так, например, при выполнении съемки зачищенной поверхности утром в облачную погоду, значения категориальных параметров, задающих тип поверхности K (кустарники), NR (низкая растительность), R (редколесье), время суток V (вечер), D (день), а также режим погоды S (солнечно) будут равны нулю, а значения Z (зачищенная
поверхность), Y (утро), O (облачно) примут значение единицы, что приведет полученную зависимость к более компактному виду.
Заключение
Полученная модель описывает влияние исследуемых факторов на отклик достаточно точно. Коэффициент детерминации 78,9 % описывает связь полученной погрешности маркшейдерских измерений при помощи геодезического квадрокоптера и исследуемых факторов как высокую по шкале Чеддока, что, в свою очередь, характеризует модель как обладающую достаточно высокой прогнозирующей способностью.
На основе полученной зависимости ведется разработка программного продукта (планируется подготовка патента) позволяющего прогнозировать качество полета путем задания набора исследованных факторов: выбранных наблюдателем значений перекрытий снимков, планируемой высоты полета и скорости квадрокоптера, скорости ветра на выбранной высоте, свойств поверхности, режима погоды и времени суток.
Математическая обработка обширного массива эмпирических данных предоставляет широкие возможности для дальнейшей формализации анализа полученных сведений, которые станут значимым подспорьем в формировании методических указаний по выполнению маркшейдерской съемки горных объектов с помощью квадрокоптера.
Литература
- Бабаев С.Н. Технология мониторинга открытых горных работ с применением беспилотного летательного аппарата // Интерэкспо Гео-Сибирь-2013. IX Международный научный конгресс, 15-26 апреля 2013 г., Новосибирск. Международная научная конференция «Геодезия, геоинформатика, картография, маркшейдерия»: Сборник материалов. Т. 3. Новосибирск: СГГА, 2013. С. 151-154.
- Blishchenko А.А. Modern mine survey techniques in the process of mining operations in open pit mines (quarries) // Scientific and Practical Studies of Raw Material Issues. London: CRC Press, 2019. 290 p.
- Колесник О.А., Прыткова А.Б. Применение воздушно-лазерного сканирования для определения видового состава и запаса древостоя при инвентаризации зеленых насаждений парка территории «Сосновка» в городе Санкт-Петербург // Актуальные вопросы землепользования и управления недвижимостью: Сборник статей Всероссийской научно-практической конференции (с международным участием), 02-03 апреля 2019, Екатеринбург. Екатеринбург: Уральский государственный горный университет, 2019. C. 593-602.
- Demidova P., Kolesnik O., Fatin H.A. 3D Modelling in solution of cadastral and geodetic // E3S Web of Conferences. 2020. Vol. 164. P. 1-9. № 07014. DOI: 10.1051/e3sconf/202016407014
- Блищенко А.А. Использование геодезических приборов на открытых горных работах, тенденция применения беспилотных технологий // Сolloquium-journal. 2020. № 14 (66). C. 4-5. DOI: 10.24411/2520-6990-2020-11902
- Корецкая Г.А., Корецкий Д.С. Совершенствование технологий маркшейдерских съемок открытых горных работ // Вестник Кузбасского государственного технического университета. 2013. № 3. С. 38-40.
- Батоцыренов Э.А., Бешенцев А.Н. Использование БПЛА в географических исследованиях // Применение беспилотных летательных аппаратов в географических исследованиях: Материалы Всероссийской научно-практической конференции, 22-23 мая 2018, Иркутск. Иркутск: Изд-во Института географии им. В.Б.Сочавы СО РАН, 2018. С.20-23.
- Коровин Д.С. Обоснование и разработка метода оценки объема угольного склада на основе аэрофотосъемки с применением беспилотных летательных аппаратов: Автореф. дис. … канд. техн. наук. Кемерово: Федеральный исследовательский центр угля и углехимии Сибирского отделения Российской академии наук, 2017. 21 с.
- Карпович М.А., Герштейн Л.М., Паневин Н.В., Карпович А.М. Применение БПЛА при проведении топографо-геодезических изысканий//Транспортная стратегия-XXI. 2013. Т. 22. С. 20-21.
- Мусина Г.А., Ожигин Д.С., Ожигина С.Б. Экологический мониторинг на основе снимков, полученных с помощью беспилотных летательных аппаратов // Интерэкспо Гео-Сибирь. 2019. Т. 4. № 2. С. 196-204.
- Оника С. Г., Куликовская О.Е., Атаманенко Ю.Ю. Использование беспилотных летательных аппаратов для решения инженерных задач маркшейдерии и геодезии // Горная механика и машиностроение. 2018. № 2. С. 15-21.
- Раков Д. Н., Никитин В.Н., Шевчук С.О. Определение задержки срабатывания затворов фотоаппаратов в аэрофотосъемочных комплексах // Интерэкспо Гео-Сибирь. 2014. Т. 1. С. 60-65.
- Присяжнюк С.П. Беспилотные летательные аппараты в лесопромышленном комплексе: возможности новых технологий // Геоинформатика. 2012. № 1. С. 6-10.
- Тригер А.Л. Обоснование методов и совершенствование технических средств маркшейдерской съемки множества объектов: Автореф. дис. … канд. техн. наук. М.: Московский государственный горный университет, 2009. 21 с.
- Опритова О.А. Исследование возможностей применения беспилотных авиационных систем для моделирования объектов недвижимости // Вестник СГУГиТ. 2018. Т. 23. № 3. С. 248-258.
- Ковязин В.Ф., Богданов В.Л., Гарманов В.В., Осипов А.Г. Мониторинг зеленых насаждений с применением беспилотных летательных аппаратов // Аграрный научный журнал. 2016. Т. 4. С. 14-19.
- Барбасов В.К., Руднев П.Р., Орлов П.Ю., Гречищев А.В. Применение малых беспилотных летательных аппаратов для съемки местности и подготовки геоинформационного контента в чрезвычайных ситуациях // Интерэкспо Гео-Сибирь-2013. IX Международный научный конгресс, 15-26 апреля 2013 г., Новосибирск. Международная научная конференция «Геодезия, геоинформатика, картография, маркшейдерия»: Сборник материалов. Т. 2. С. 158-163.
- Эпов М.И., Злыгостев И.Н. Применение беспилотных летательных аппаратов в аэрогеофизической разведке // Интерэкспо Гео-Сибирь. 2012. Т. 2. № 3. С. 22-27.
- Chepyzhova A.V., Pravdina E.A., Lepikhina O.Yu. Comparative evaluation of the effectiveness of the laser scanning and aerial photography systems using unmanned aerial vehicles // Journal of Physics: Conference Series. 2019. № 1333. P. 1-5. DOI: 10.1088/1742-6596/1333/3/032064
- Osipov A., Dmitriev V., Kovyazin V., Romanchikov A. Cartographo-Mathematical Modelling of Landscape Diversity for Land Use Planning Purposes // IOP Conference Series: Earth and Environmental Science. 2020. № 574. P.1-8. DOI: 10.1088/1755-1315/574/1/012058
- Блищенко А.А., Гусев В.Н. Совместное использование электронных тахеометров и GNSS-приемников для маркшейдерских съемок на карьерах // Естественные и технические науки. 2019. № 4 (130). C. 79-81.
- Патент № 2020618624 РФ. Программа для определения объема склада малого размера, измеренного с помощью комплекса для геодезической аэрофотосъемки на основе квадрокоптера среднего сегмента / В.Н.Гусев, В.В.Иванов, А.А.Блищенко. Опубл. 30.07.2020. Бюл. № 2020617497.
- Dorokhov D.V., Nizametdinov F.K., Ozhigin S.G., Ozhigina S.B. A Technique for surveying of ground surface deformations in mine field // Jornal of Mining Science. 2018. Vol. 54. P. 874-882. DOI: 10.1134/S1062739118055011
- ИсмагиловР.И., ЗахаровА.Г., БадтиевБ.П. идр. Внедрение беспилотных летательных аппаратов для оперативного решения научно-производственных задач в условиях Михайловского ГОКа им. А.В.Варичева // Горная промышленность. 2020. Т. 3. С. 26-30. DOI: 10.30686/1609-9192-2020-3-26-30
- Кремчеев Э.А., Данилов А.С., Смирнов Ю.Д. Состояние метрологического обеспечения систем мониторинга на базе беспилотных воздушных судов // Записки Горного института. 2019. Т. 235. С. 96-105. DOI: 10.31897/PMI.2019.1.96
- Аврунев Е.И., Ямбаев Х.К., Опритова О.А. и др. Оценка точности 3D-моделей, построенных с использованием беспилотных авиационных систем // Вестник Сибирского государственного университета геосистем и технологий. 2018. Т. 23. № 3. С. 211-228.
- Долгополов Д.П. Возможности использования беспилотных авиационных систем для контроля соответствия результатов строительства площадных объектов трубопроводного транспорта проектным решениям // Вестник СГУГиТ. 2020. Т. 25. № 4. C. 85-92.
- Михайлов А. П., Монтель Андраде Э.Р., Мануэль де Хесус П.В. О применении цифровых фотокамер со шторно-щелевым затвором для выполнения аэрофотосъемки с легкомоторных и беспилотных летательных аппаратов // Известия высших учебных заведений. Геодезия и аэрофотосъемка. 2013. № 4. С. 30-32.
- Турсбеков С.В. Солтабаева С.Т., Нуртуганов Б.Н. и др. Современное маркшейдерско-геодезическое приборостроение // Вестник Кыргызско-Российского Славянского университета. 2015. Т. 15. № 5. С. 145-148.
- Хлебникова Т.А., Опритова О.А., Аубакирова С.М. Экспериментальные исследования точности построения фотограмметрической модели по материалам БПЛА // Интерэкспо Гео-Сибирь. 2018. Т. 1. № 4. С. 32-37.
- Деришев Д.С., Деришев С.Г. Беспилотные авиационные комплексы для геофизических исследований и мониторинга земной поверхности // Интерэкспо Гео-Сибирь. 2010. Т. 4. № 1. С. 46-50.