
Study of a set of factors influencing the error of surveying mine facilities using a geodesic quadcopter
- 1 — Ph.D., Dr.Sci. Professor Saint Petersburg Mining University ▪ Orcid
- 2 — Postgraduate Student Saint Petersburg Mining University ▪ Orcid
- 3 — Ph.D. Associate Professor Saint Petersburg Mining University ▪ Orcid

Abstract
The factors influencing the qualitative and quantitative components of the result of surveying in open-pit mining using a quadcopter were identified and systematized, and the mathematical dependence of the influence of factors on the final error of surveying was determined. After a large number of field observations – numerous flights of a geodesic quadcopter over mining facilities – the subsequent mathematical justification of the results of the aerial photogrammetric surveying was made, which allowed to analyze the degree of participation in the final accuracy of the survey of each of the considered factors. The results of this study demonstrate the source of errors, which provide the surveyor with the opportunity to efficiently and competently carry out pre-flight preparation and planning of fieldwork. The study and subsequent consideration of the factors affecting the accuracy of surveying with the use of an unmanned aerial vehicle are the basis for the subsequent development and formation of a methodology for using a geodesic quadcopter in the conditions of open-pit mining.
None
Introduction
Currently, surveying is on the way to reduce the time spent on field work [1, 2], however, office work is becoming more complicated due to the use of new survey technologies, methods and instruments. The information is processed with the help of increasingly modern software, which requires from the surveyor as an engineer not only knowledge of mining and technical processes, but also programming skills and digital processing of the results obtained [3, 4]. An example of this is the use of unmanned technologies in the surveying measurement of mining objects in open-pit mining [5, 6].
Unmanned aerial vehicles (UAV) are increasingly being used [7, 8] due to the rapid deployment of the survey complex [9, 10], the ability to obtain up-to-date information [11, 12], as well as high profitability when surveying small territories and objects.
Aerial photogrammetric surveying for professional mapping of the territory and the display of the actual surface places increased demands on the output data, namely, to maintain the geometric parameters of the survey. Small UAVs – quadcopters – are economical [13, 14] and portable, which makes them convenient for surveying mining facilities of a small area (no more than 100 hectares) [15]. Aerial photography using a quadcopter does not differ from surveying using airplanes [16], but is performed from a lower altitude and at lower flight speeds [17, 18].
The methods of using UAVs are developing at a high pace [19, 20], but the main principle of each survey remains the same – high measurement accuracy that meets the requirements of normative acts, and, consequently, a reduction in surveying errors [21-23].
Problem statement
Currently, norms and rules for the use of unmanned technologies in open-pit mining have not been formed [24, 25], with the exception of instructions for their use provided by manufacturers. This indicates the need for research in this area and the creation of a mathematical justification for the use of a quadcopter in the mining industry [26, 27]. A competent and correctly chosen theoretical justification of the process of aerial photography of objects using quadcopters will contribute to the formation of a methodology for using this technology in the production activities of surveyors [28, 29].
Due to the experience of the flights performed, as well as the tests of equipment manufacturers, in the course of this study, the subjects of the study were identified – the decisive reasons for obtaining any error when measuring objects and surfaces using quadcopters [30].
Methodology
The regulated and unregulated parameters were identified as the reasons that have a significant impact on the efficiency of the quadcopter and the performance of aerial photogrammetric measurement. The bifurcation of the influencing factors is due to the possibility of influencing the parameters.
Regulated factors:
- UAV flight altitude, m (60, 80, 100, 120, 140);
- UAV flight speed, m/s (5, 7, 9, 11, 13, 15);
- number of identifications, pcs. (0, 1, 2, 3);
- forward and lateral overlap of the images (55/75, 65/75, 75/85, 85/95).
Unregulated (external) factors:
- weather conditions (sunny, cloudy);
- time of day (illumination) (morning, afternoon, evening);
- wind speed, m/s (2.5, 7.5, 12.5, 17.5);
- surface properties (cleaned surface, low vegetation, shrubs, sparse woodlands).
To determine the factors affecting the error of aerial photogrammetric measurements and final errors, about a thousand flights were performed, each with its own purpose (based on the specified parameterization and determinism of error factors). The selection of the parameters of the influencing factors is based on the experience of flights on the ground, not laboratory tests [31]. Field work was carried out on the deposits of sands, sand-gravel material and limestones of the Leningrad region.
Reducing the complexity of field surveying using a quadcopter is the main feature of the shift in the balance of “field work + office processing” at the present stage of the development of surveying measurements.
The field work was carried out using the DJI Phantom 4 PRO geodesic quadcopter – the most commonly used by specialists for surveying on a mining facility. Field work is divided into geodetic and hardware components. Geodetic is a coordinate determination of the position of identification marks located on the territory of the object being shot (70-100 hectares) and forming a rigid figure (for example, a triangle), three identification marks are used, which is recommended by the instructions of manufacturers.
The next stage is the installation of geodetic satellite equipment at a known point in static mode to obtain raw rinex data. Data can also be purchased from commercial organizations that have a network of basic reference stations.
Teobox and Agisoft Metashape Pro programs were used to process the data obtained as a result of the survey flight. The accuracy of the survey meets the requirements of the instructions for surveying measurements, and at a scale of 1:1000 is 40 cm, but, most often, the accuracy of the survey, the number of identification marks is set by the project documentation and technical specifications.
The hardware component consists in choosing the takeoff location of the geodetic quadcopter (usually the center of the object being shot), assembling the UAV (detaching static holders, attaching screws), connecting the control panel, checking the reception of the navigation signal (receiving signals from GLONASS satellites, GPS, etc.), checking the camera's operability, adjusting it depending on the environment (setting the focus based on the altitude of the flight, the brightness of the shooting depending on the weather condition and the sunshine of the time of day).
An important part of preparing a quadcopter for flight is calibration, which is performed to orient it on the ground, determine its location relative to the earth's surface. Before takeoff itself, with the help of specialized programs (if this procedure was not carried out in advance), the flight route is built – the flight altitude is set (70-100 m). These values are recommended by the manufacturers' instructions and experience in the practical use of a geodetic quadcopter. At a lower altitude, there is a risk of the vehicle colliding with a forest area or other objects due to ground features. At a height of more than 100 m, the clarity, brightness and color of images are lost, since the photographic equipment of a geodetic quadcopter has a constant aperture and diaphragm width. Finally, the operability of all the main functions of the geodetic equipment is automatically checked and the flight takes place.
Each experiment is a separate surveying measurement of the object being taken (plots with an area of ≈ 70-100 hectares). The accuracy of the work performed is determined by the position of the created model relative to the coordinates of the identification marks. Thus, if the coordinate determination of the identifications is reduced to the true value, only the accuracy of the surveying measurement of the object being taken is determined, excluding other random errors. The requirements for the accuracy of surveying using a geodetic quadcopter correspond to the ordinary values for surveying measurements in open-pit mining operations, presented in the current regulatory documentation.
Office processing of the results of field flights (aerial photogrammetric surveying measurements) was carried out in the Agisoft Metashape Pro program. A large and interfactorial sample of the obtained results of surveying errors using UAVs was initialized and prepared for subsequent analysis.
There are numerous methods of mathematical processing [18] for registration, description and analysis of observational and experimental data in order to construct probabilistic models of mass random phenomena. Taking into account the mathematical nature of specific observation results, one of the objectives of the study was to identify the degree of impact of each influence factor on the final error, and as a result – on the final result of aerial photogrammetric surveying. This problem was solved using two-factor variance analysis, which consisted in comparing the intergroup and within-group variances and forming a judgment on the influence and role of each studied factor on the basis of this ratio.
The main difference between two-factor analysis of variance and one-factor analysis is the simultaneous assessment of the influence of a pair of factors. Since there are quite a large number of levels of each factor in the considered series of experiments, the MS Excel data analysis package was used to implement two-factor analysis. In a two-factor experiment, factors A and B are considered to interact if the effect of factor A depends on the level of factor B. The variance analysis is closely related to the appropriate planning of the experiment.
The influence of two independent variables (influencing factors) on the dependent variable (measurement error) was checked. The results of this large-scale and significant in its mathematical calculations two-factor variance analysis of empirical measurements of aerial photogrammetric flights are presented in Table 1. The final indicator of the mathematical justification is the coefficients of determination, showing the proportion of variation of the effective feature, explained by the variation of the factor feature.
Table 1
Results of two-factor variance analysis
|
Pairs of factors |
Coefficient of determination of factor 1, % |
Coefficient of determination of factor 2, % |
|
Altitude/speed of the UAV |
97.6 |
2.0 |
|
UAV altitude/identifications |
62.6 |
21.9 |
|
UAV altitude/overlap |
39.3 |
38.7 |
|
UAV altitude/surface properties |
68.4 |
14.1 |
|
UAV altitude / wind speed |
80.1 |
11.2 |
|
UAV altitude / weather condition |
72.3 |
15.6 |
|
UAV altitude / time of day (illumination) |
65.8 |
16.0 |
|
UAV speed / identifications |
10.0 |
65.1 |
|
UAV speed /overlap |
8.1 |
76.8 |
|
UAV speed / surface properties |
35.8 |
49.9 |
|
UAV speed / wind speed |
43.2 |
51.5 |
|
UAV speed / weather condition |
28.5 |
62.2 |
|
UAV speed / time of day (illumination) |
20.4 |
65.1 |
|
Identifications / overlap |
40.2 |
55.2 |
|
Identifications / surface properties |
68.1 |
21.2 |
|
Identifications / wind speed |
67.5 |
14.5 |
|
Identifications /weather condition |
55.2 |
34.8 |
|
Identifications / time of day (illumination) |
61.3 |
25.4 |
|
Overlap / surface properties |
70.1 |
14.5 |
|
Overlap / wind speed |
88.1 |
10.2 |
|
Overlap / weather condition |
72.4 |
15.8 |
|
Overlap / time of day (illumination) |
66.1 |
20.8 |
|
Surface properties / wind speed |
45.2 |
35.8 |
|
Surface properties / weather condition |
56.8 |
28.9 |
|
Surface properties / time of day (illumination) |
60.5 |
30.2 |
|
Wind speed / weather condition |
34.1 |
58.9 |
|
Wind speed / time of day (illumination) |
32.1 |
66.0 |
|
Weather condition / time of day (illumination) |
40.8 |
56.1 |
The effect of the influence of each two variables on the error of surveying measurements was studied. Significant factors of influence, the values of which are of particular interest for subsequent mathematical processing, are highlighted in color in Table 1. The initial results of the experiment indicate the precision of the research and highlight the special parameters of the implemented experiments (Figure).
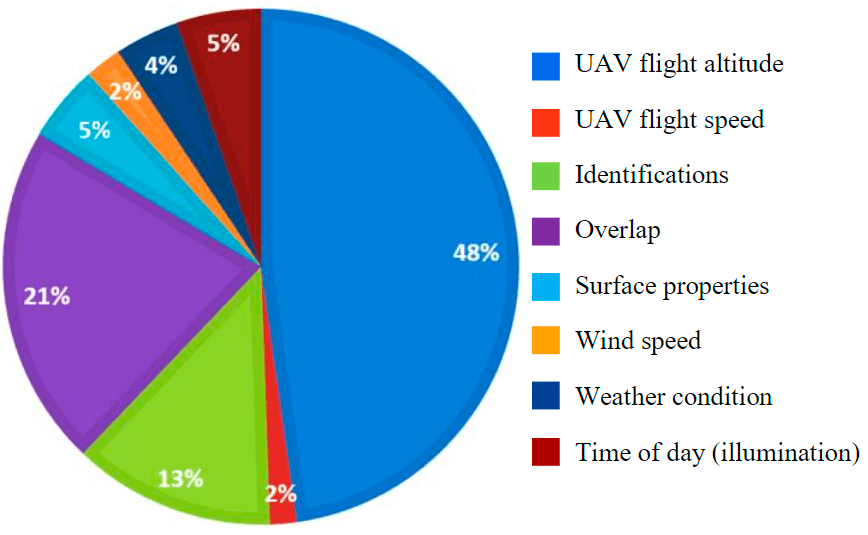
The degree of influence of the studied factors on the accuracy of quadcopter surveying
The degree of influence of factors on the error of aerial photogrammetric measurements is obvious. The absolutely dominant parameter is the altitude of the UAV flight, the components of the overlap of the images and the number of identifications, in turn, have a high degree of importance. The other parameters have less influence and only carry mathematical details in the overall component of the final error. But, despite the predominance of certain factors, it is impossible to neglect other parameters – wind speed and UAVs, surface properties, weather conditions and time of day. Thus, it is possible to make a typical selection error, common in the analysis of mathematical data. The role of secondary parameters is not so great in its mathematical value, however, given the precision of calculations and their total effect on the final error, the role is quite significant.
The most important conclusion of the presented study is that the factors that have the greatest impact on the accuracy of the survey are regulated, i.e., the surveyor in preparation for field measurements on mining facilities can reduce the error due to understanding the ratio of influence factors in the formation of the UAV flight error.
The next step towards substantiating and developing a methodology for using a quadcopter for surveys is to create a software product capable of performing a preliminary (pre-flight) assessment of the accuracy of surveying measurements. A regression analysis of the model represented by 500 flights was carried out using the classical least squares method
where уi^ , уi – predicted and actual response values at point i, respectively.
The model implemented in the Minitab 20.2 software environment takes into account categorical factors (surface properties, weather conditions, time of day), quadratic influences of numerical factors, as well as their paired interactions. Further complication of the model is considered irrational due to the high multicollinearity (mutual influence) of factors.
To account for the influence of categorical factors with more than two values, they were converted into dummy variables using the encoding –1; 0; 1, (Tables 2, 3). The categorical factor "weather condition", which takes only two values (sunny S/cloudy O), was encoded binary.
Table 2
Encoding of the “time of day” factor
|
The significance of the factor in observation |
The value of the encoded factor |
|
|
Evening |
Day |
|
|
Evening V |
1 |
0 |
|
Day D |
0 |
1 |
|
Morning Y |
–1 |
–1 |
Table 3
Encoding of the “surface properties” factor
|
The significance of the factor in observation |
The value of the encoded factor |
||
|
The cleaned surface |
Shrubs |
Low vegetation |
|
|
The cleaned surface Z |
1 |
0 |
0 |
|
Shrubs K |
0 |
1 |
0 |
|
Low vegetation NR |
0 |
0 |
1 |
|
Sparse woodlands R |
–1 |
–1 |
–1 |
In order to give a qualitative assessment of the relation, taking into account both numerical and categorical factors, the Cheddock scale was used, according to which the coefficient of determination (%) 10-30 corresponds to a weak relation between the studied parameters, 30-50 – moderate, 50-70 – noticeable, 70-90 – high, and 90-99 – very high. The scale is conditional, but it is widely used in the construction of multifactorial mathematical models.
Initially, a linear model was investigated, but it did not describe the dependence accurately enough (the coefficient of determination was 63.7 %, which corresponds to a noticeable relationship on the Cheddock scale), and the graph of standardized residuals showed that the function changes non-linearly, so the model included quadratic influences of all numerical factors, as well as all possible interactions of factors among themselves; in addition, response transformations were performed to normalize the residuals. As a result of the described modeling and step-by-step elimination of insignificant interactions and factors, the following model was obtained:
where Н – the altitude of the flight, m; V1, V2 – the speed of the quadcopter and the wind, respectively, m/s; P1, P2 – the values of the forward and lateral overlap, respectively, %; N – number of identifications, pcs.
Formula (2) is presented in general form, and for each combination of factors it will have a simplified form. Each of the studied categorical factors (surface properties, weather conditions, time of day) takes the values 0 or 1, i.e., in the final formula is set binary to simplify perception and use. So, for example, when surveying a cleaned surface in the morning in cloudy weather, the values of categorical parameters specifying the type of surface K (shrubs), NR (low vegetation), R (sparse woodlands), time of day V (evening), D (day), as well as the weather mode S (sunny) will be zero, and the values of Z (cleaned surface), Y (morning), O (cloudy) will take the value of one, which will lead the resulting dependence to a more compact form.
Conclusion
The resulting model describes the influence of the studied factors on the response quite accurately. The coefficient of determination of 78.9% describes the relationship between the obtained error of surveying measurements using a geodetic quadcopter and the studied factors as high on the Cheddock scale, which, in turn, characterizes the model as having a sufficiently high predictive ability.
Based on the obtained dependence, a software product is being developed (a patent is planned to be prepared) which allows predicting flight quality by specifying a set of studied factors: the values of the overlap of the images selected by the observer, the planned flight altitude and speed of the quadcopter, wind speed at the selected altitude, surface properties, weather condition and time of day.
Mathematical processing of an extensive set of empirical data provides ample opportunities for further formalization of the analysis of the information obtained, which will become a significant help in the formation of methodological guidelines for the performance of surveying of mining facilities using a quadcopter.
References
- Babaev S.N. Monitoring technology surface mining with unmanned aerial vehicles. The International Exhibition and Scientific Congress “Interexpo Geo-Siberia”, 15-26 April 2013, Novosibirsk, Russia. Vol. 3. Novosibirsk: Siberian State University of Geosystems and Technologies, 2013, p. 151-154 (in Russian).
- Blishchenko А.А. Modern mine survey techniques in the process of mining operations in open pit mines (quarries). Scientific and Practical Studies of Raw Material Issues. London: CRC Press, 2019, p. 290.
- Kolesnik O.A., Prytkova A.B. The use of air-laser scanning to determine the species composition and stock of the forest stand during the inventory of green spaces of the Sosnovka territory Park in the city of St. Petersburg. Aktualnye voprosy zemlepolzovaniya i upravleniya nedvizhimostyu: Sbornik statei Vserossiiskoi nauchno-prakticheskoi konferentsii (s mezhdunarodnym uchastiem), 02-03 aprelya 2019, Ekaterinburg. Ekaterinburg: Uralskii gosudarstvennyi gornyi universitet, 2019, p. 593-602 (in Russian).
- Demidova P., Kolesnik O., Fatin H.A. 3D Modelling in solution of cadastral and geodetic. E3S Web of Conferences. 2020. Vol. 164. N 07014, p. 1-9. DOI: 10.1051/e3sconf/202016407014
- Blishchenko A.A. Use of geodetic instruments in open-pit mining, the trend of using unmanned technologies. Сolloquium-journal. 2020. N 14 (66), p. 4-5. DOI: 10.24411/2520-6990-2020-11902
- Koretskaya G.A., Koretskii D.S. Improving the technologies of mine surveys of open-pit mining. Vestnik Kuzbasskogo gosudarstvennogo tekhnicheskogo universiteta. 2013. N 3, p. 38-40 (in Russian).
- Batotsyrenov E.A., Beshentsev A.N. The use of UAVs in geographical research. Primenenie bespilotnykh letatelnykh apparatov v geograficheskikh issledovaniyakh: Materialy Vserossiiskoi nauchno-prakticheskoi konferentsii, 22-23 maya 2018, Irkutsk. Irkutsk: Izd-vo Instituta geografii im. V.B.Sochavy SO RAN, 2018, p. 20-23 (in Russian).
- Korovin D.S. Substantiation and development of a method for estimating the volume of a coal storage based on aerial survey using unmanned aerial vehicles: Avtoref. dis. … kand. tekhn. nauk. Kemerovo: Federalnyi issledovatelskii tsentr uglya i uglekhimii Sibirskogo otdeleniya Rossiiskoi akademii nauk, 2017, p. 21 (in Russian).
- Karpovich M.A., Gershtein L.M., Panevin N.V., Karpovich A.M. The use of UAVs during topographic and geodetic surveys. Transportnaya strategiya-XXI. 2013. Vol. 22, p. 20-21 (in Russian).
- Musina G.A., Ozhigin D.S., Ozhigina S.B. Environmental monitoring based on images obtained with the help of unmanned aerial vehicles. Interekspo Geo-Sibir. 2019. Vol. 4. N 2, p. 196-204 (in Russian).
- Onika S.G., Kulikovskaya O.E., Atamanenko Yu.Yu. The use of unmanned aerial vehicles for solving engineering problems of surveying and geodesy. Gornaya mekhanika i mashinostroenie. 2018. N 2, p. 15-21 (in Russian).
- Rakov D.N., Nikitin V.N., Shevchuk S.O. Determination of the delay in the operation of camera shutters in aerial photography complexes. Interekspo Geo-Sibir. 2014. Vol. 1, p. 60-65 (in Russian).
- Prisyazhnyuk S.P. Unnamed aerial vehicles in timber processing complex: capabilities of new technologies. Geomatics. 2012. N 1, p. 6-10 (in Russian).
- Triger A.L. Substantiation of methods and improvement of technical means of surveying a variety of objects: Avtoref. dis. … kand. tekhn. nauk. Moscow: Moskovskii gosudarstvennyi gornyi universitet, 2009, p. 21 (in Russian).
- Opritova O.A. Investigation of the possibilities of using unmanned aircraft systems for modeling real estate objects. Vestnik SGUGiT. 2018. Vol. 23. N 3, p. 248-258 (in Russian).
- Kovyazin V.F., Bogdanov V.L., Garmanov V.V., Osipov A.G. Monitoring of green areas with the use of unmanned aerial vehicles. Agrarnyi nauchnyi zhurnal. 2016. Vol. 4, p. 14-19 (in Russian).
- Barbasov V.K., Rudnev P.R., Orlov P.Yu., Grechishchev A.V. The application of hand-held unmanned aerial vehicles for terrain surveying and preparing of gis content in emergencies. The International Exhibition and Scientific Congress “Interexpo Geo-Siberia”, 15-26 April 2013, Novosibirsk, Russia. Vol. 2. Novosibirsk: Siberian State University of Geosystems and Technologies, 2013, p. 158-163 (in Russian).
- Epov M.I., Zlygostev I.N. The use of unmanned aerial vehicles in aerogeophysical prospecting. Interekspo Geo-Sibir. 2012. Vol. 2. N 3, p. 22-27 (in Russian).
- Chepyzhova A.V., Pravdina E.A., Lepikhina O.Yu. Comparative evaluation of the effectiveness of the laser scanning and aerial photography systems using unmanned aerial vehicles. Journal of Physics: Conference Series. 2019. N 1333, p. 1-5. DOI: 10.1088/1742-6596/1333/3/032064
- Osipov A., Dmitriev V., Kovyazin V., Romanchikov A. Cartographo-Mathematical Modelling of Landscape Diversity for Land Use Planning Purposes. IOP Conference Series: Earth and Environmental Science. 2020. N 574, p. 1-8. DOI: 10.1088/1755-1315/574/1/012058
- Blishchenko A.A., Gusev V.N. Joint use of electronic total stations and GNSS receivers for mine surveys at pits. Estestvennye i tekhnicheskie nauki. 2019. N 4 (130), p. 79-81 (in Russian).
- Gusev V.N., Ivanov V.V., Blishchenko A.A. Patent N 2020618624 of the Russian Federation. A program for determining the volume of a small storage, measured using a complex for geodetic aerial photography based on a mid-segment quadcopter. Opubl. 30.07.2020. Bul. N 2020617497 (in Russian).
- Dorokhov D.V., Nizametdinov F.K., Ozhigin S.G., Ozhigina S.B. A Technique for surveying of ground surface deformations in mine field. Jornal of Mining Science. 2018. Vol. 54, p. 874-882 (in Russian). DOI: 10.1134/S1062739118055011
- Ismagilov R.I., Zakharov A.G., Badtiev B.P. et al. Introduction of unmanned aerial vehicles for the operational solution of scientific and production tasks in the conditions of the Mikhailovsky GOK named after A.V.Varichev. Gornaya promyshlennost. 2020. Vol. 3, p. 26-30 (in Russian). DOI: 10.30686/1609-9192-2020-3-26-30
- Kremcheev E.A., Danilov A.S., Smirnov Yu.D. Metrological Support of Monitoring Systems Based on Unmanned Aerial Vehicles. Journal of Mining Institute. 2019. Vol. 235, p. 96-105. DOI: 10.31897/PMI.2019.1.96
- Avrunev E.I., Yambaev Kh.K., Opritova O.A. et al. Accuracy evaluation of 3D models by using unmanned aerial system. Vestnik of SSUGT. 2018. Vol. 23. N 3, p. 211-228 (in Russian).
- Dolgopolov D.P. The possibility of using unmanned aircraft systems to control the compliance of the results of the construction of areal pipeline transport facilities with design solutions. Vestnik SGUGiT. 2020. Vol. 25. N 4, p. 85-92 (in Russian).
- Mikhailov A. P., Montel Andrade E.R., Manuel de Khesus P.V. About the use of digital cameras with a curtain-slit shutter for aerial survey from light-engine and unmanned aerial vehicles. Izvestiya vysshikh uchebnykh zavedenii. Geodeziya i aerofotosemka. 2013. N 4, p. 30-32 (in Russian).
- Tursbekov S.V. Soltabaeva S.T., Nurtuganov B.N. et al. Modern surveying and geodetic instrumentation. Vestnik Kyrgyzsko-Rossiiskogo Slavyanskogo universiteta. 2015. Vol. 15. N 5, p. 145-148 (in Russian).
- Khlebnikova T.A., Opritova O.A., Aubakirova S.M. Experimental studies of the accuracy of constructing a photogrammetric model based on UAV materials. Interekspo Geo-Sibir. 2018. Vol. 1. N 4, p. 32-37 (in Russian).
- Derishev D.S., Derishev S.G. Unmanned aircraft systems for geophysical research and monitoring of the Earth's surface. Interekspo Geo-Sibir. 2010. Vol. 4. N 1, p. 46-50 (in Russian).